Hi people.
I juste recieved the LPR550AL gyroscope today.
I tested it withe my Arduino Uno and then read the results below :
Nothing stable according to me. And these “0” stepping two by two…  .
.
Is that normal?
Thanks.
Hi people.
I juste recieved the LPR550AL gyroscope today.
I tested it withe my Arduino Uno and then read the results below :
Nothing stable according to me. And these “0” stepping two by two… .
Is that normal?
Thanks.
Hello.
I changed the subject of this thread to be more appropriate and moved it to the Product Support section of the forum.
I am sorry you are having trouble with the gyro. Those readings do look unusual. Could you post your entire Arduino sketch here, along with a description of all the components in your system and how they are connected? A few photographs would also help us identify the problem. You soldered the included header pins into the gyro, right?
–David
Hi.
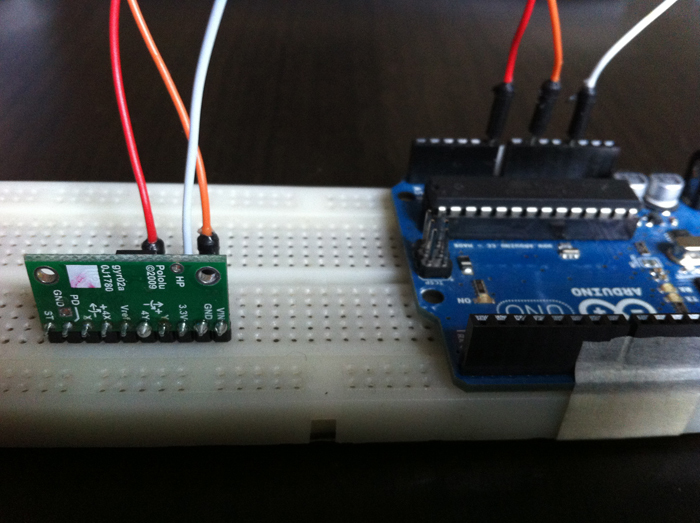
Here are some pics.
I did some basic connections like withe the MMA7361L accelerometer.
More basic. I let the X axis unconnected. Just to have only one value to be printed.
I tried withe the Y as the 4Y connected.
Sorry. I would have done better connecting the X axis. But… My mistake ![]()
Same results.
Are these values normal?
What do I have to do?
Change the gyro?
And The code I use for the Uno is the following :
#define X_AXIS 0
#define Y_AXIS 1
#define Z_AXIS 2
void setup() {
Serial.begin(9600);
}
void loop() {
int x = analogRead(X_AXIS);
int y = analogRead(Y_AXIS);
int z = analogRead(Z_AXIS);
Serial.println(x);
}Thanks.
Hello.
I don’t think I understand what you are doing. Your code is printing the variable “x”, which is supposed to be the reading from the X axis, but you wrote “I let the X axis unconnected.”. Reading the value of an unconnected analog input could give you unreliable results like that.
Could you please clarify which output (X, Y, or Z) of the gyro you are currently trying to read, and then provide the corresponding code and wiring pictures that you used to read the output?
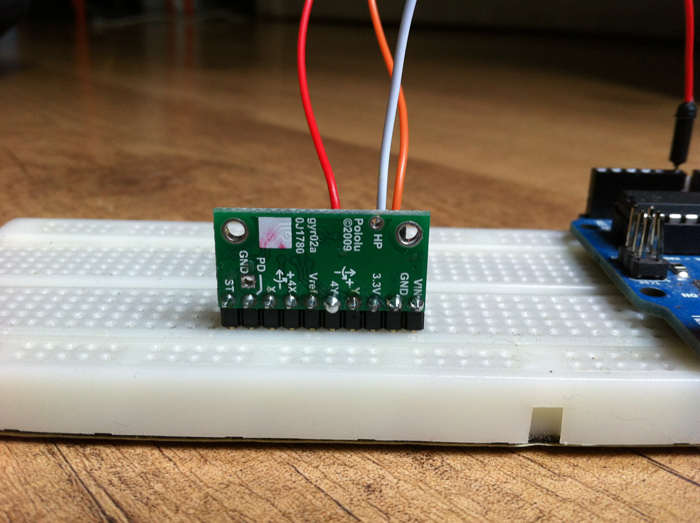
Your soldering of the 4Y pin looks suspect.
The way you took the photo it is hard to tell which pins the wires are actually connecting to. A picture of the other side of the board would help.
If you have a multimeter, it would be useful to use it to directly measure the gyro outputs.
–David
Thanks for your response.
For the picture, I connected the “Y” by mistake.
Doing the test The “X” was connected.
I tried with the “Y” too. Same result.
About the soldering, I’ ve cleaned the 4Y pin.
I’ll post a better photo tomorow.
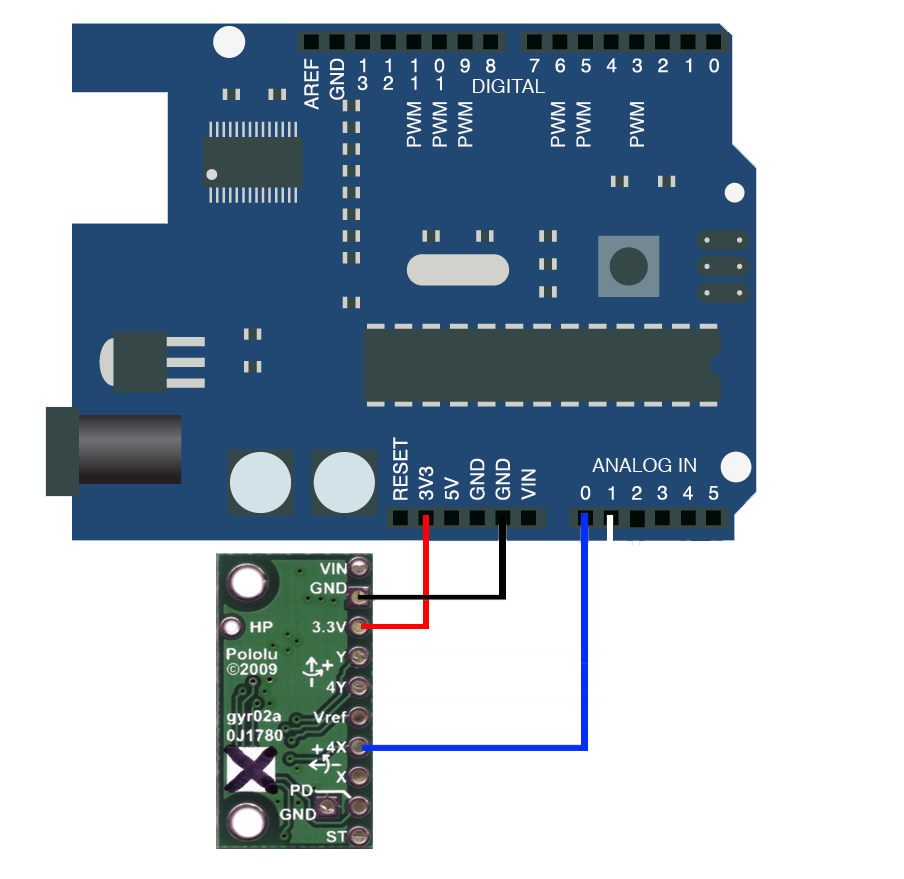
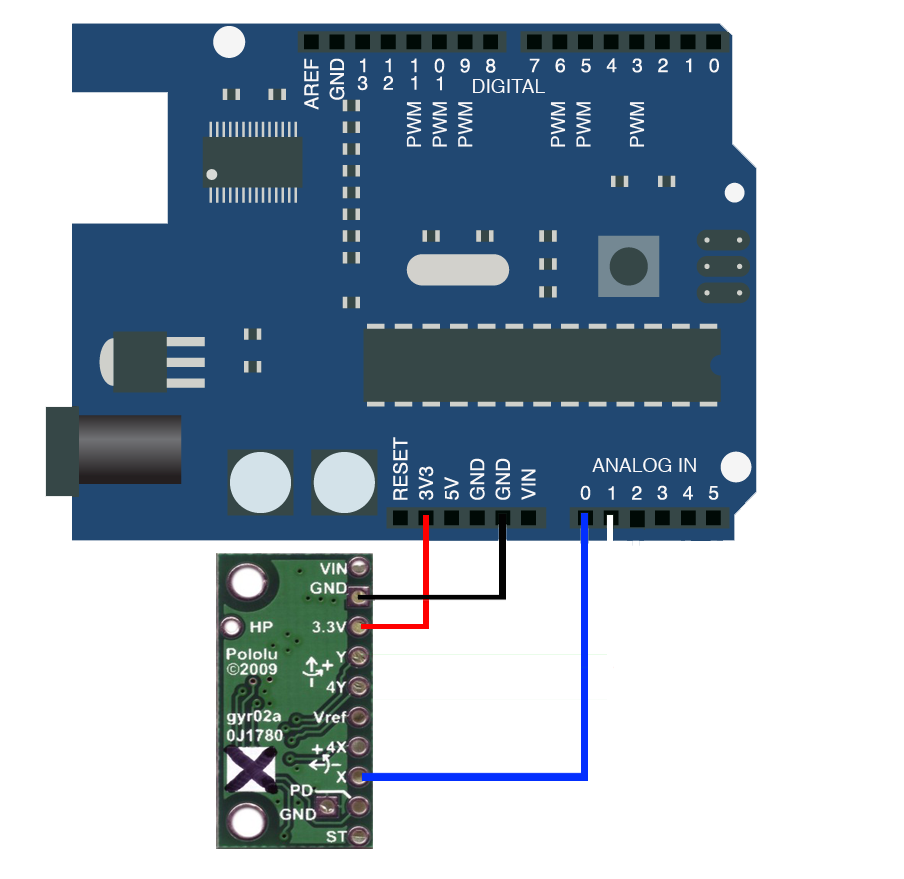
Bellow is a diagram of my wiring.
I’ve tried two ways. X and 4X.
Thanks for your help
Thank you for all the details. I looked into it a little more and found out that the PD pin needs to be set low. The product page says:
Could you try connecting PD to GND?
–David
Thanks.
I’ll try this tomorrow.
Hi.
PD to GND…
It works well.
Thanks.