HI,
Scott here from Salem, Oregon. I am really stuck. Every time I run the motors the servos go crazy. I have tried to eliminate this noise with .1uf caps, 3 per motor as explained on the motor noise pololu tutorial. I have also tried putting a 47 and 470 cap across pos and neg at the power source with no luck, and one between the servo signal ttl signal line and ground (this broke my servo’s electronics for some reason). The only way to reduce this problem is use a separate power supply for the servos with common grounds. This does not eliminate the problem, but the servo is then usable with a little shake. I started using the maestro motor controller and disconnected it and am using the servo library in the arduino for the time being until I can get the noise out. I twisted the wires where possible and shortened them.
When I disconnect the servo ttl signal line, and run the motors, the servo does not shake (and of course does not work). With the servo signal line connected, When I don’t run the motors, the servo works fine via xbee tranmitter and receiver. It’s when I run the motors that the servos are get drunk crazy and are unusable. Can you please help me? I researched the forums but can’t seem to fix it.
I have a 4 wheel drive robot I am building. Parts include:
- 4 Pololu brushed motors, 6 volt with 2 Pololu motor controllers.
- 1 Mini Maestro Servo controller
- Arduino Mega
- Transmitting xbee series 1 with 2 pots for tank drive control and one for pan/tilt servos control
- Receiving xbee with logic level converter connected to the arduino mega.
- When complete 2 servos for pan tilt (small camera on top) and
- Two more servos to lift a camera arms
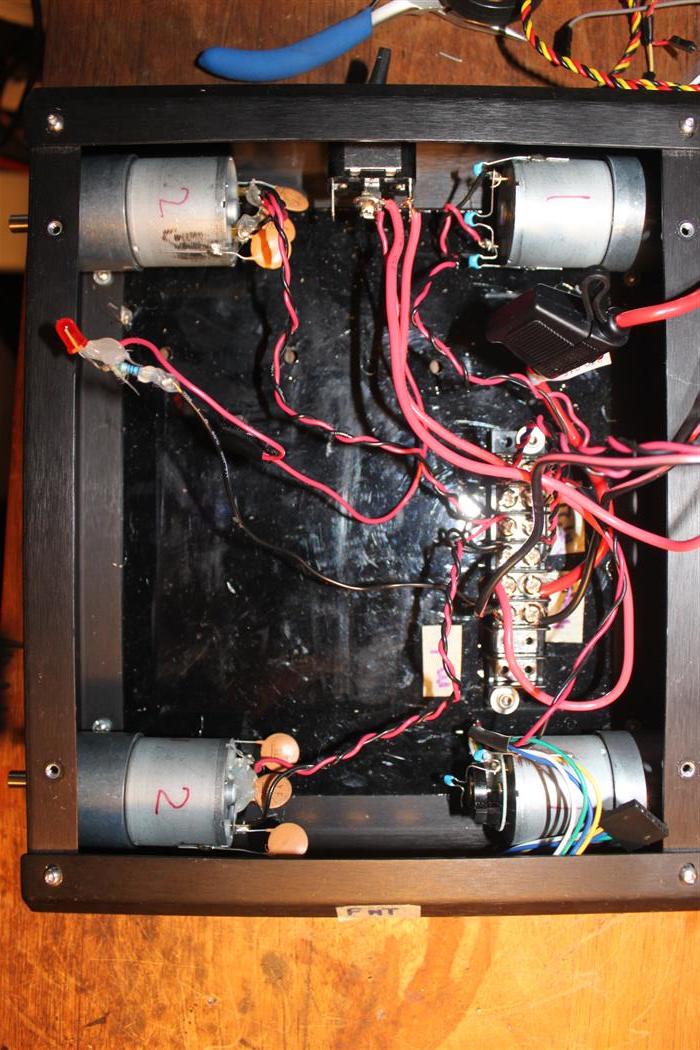
Picture #1: the motors with the capacitors installed
Picture #2: The home made 6 volt battery pack installed
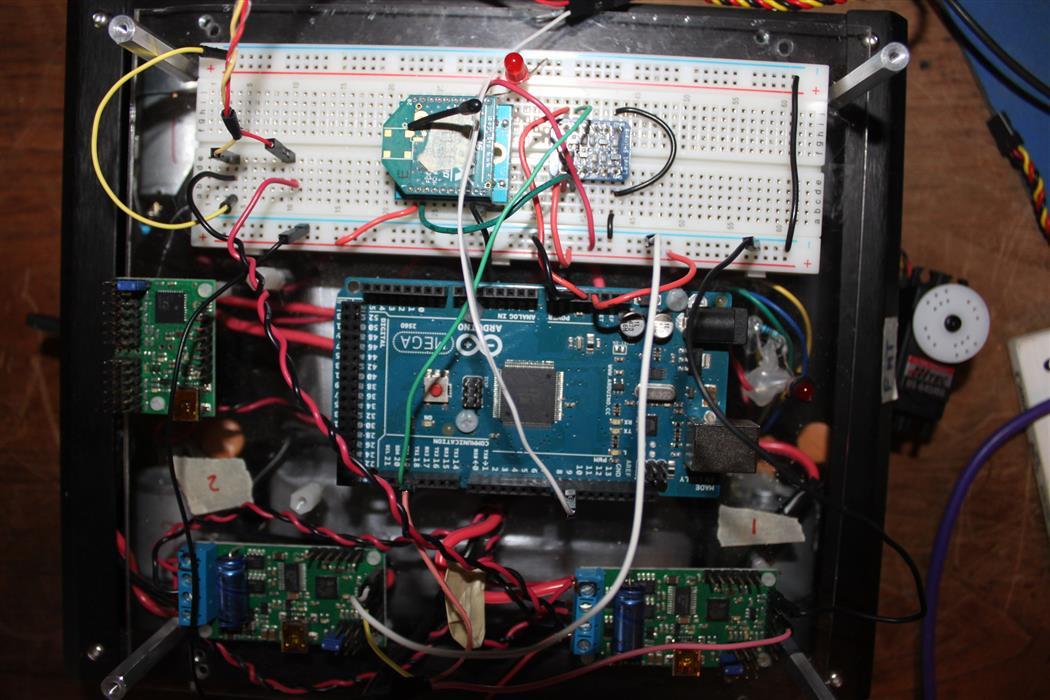
Picture #3: Top plate installed. Yellow/red twisted wires at top are servo power wires. The white in arduino pin #9 is the servo signal wire. Receiving xbee, LLC, motor controllers, Maestro controller
Here are 3 images.