So I just finished this project up enough to share. Still work to do ![]() Lots of Pololu components helped keep it simple. Had a list of requirements for this project.
Lots of Pololu components helped keep it simple. Had a list of requirements for this project.
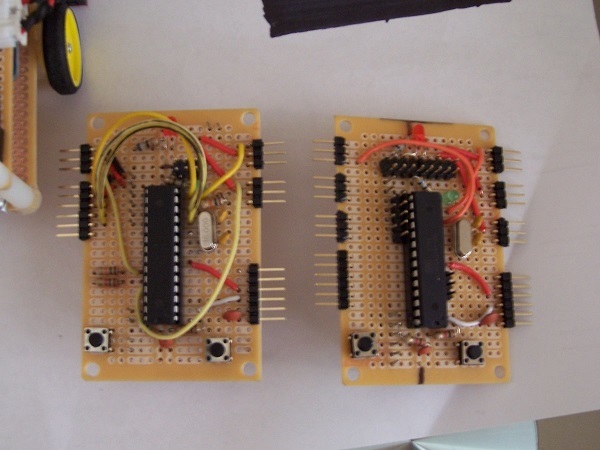
- dual ATMEGA 328PU , for playing with I2C
- completely modular so updates and modifications could be developed, but not permenant
- small, I’m a pre-engineering major at UNM-LA and it goes with me for some class work and
when i can I work on programming. - basic line following, obstacle avoidance
- LiPol, on-board charging, single cell
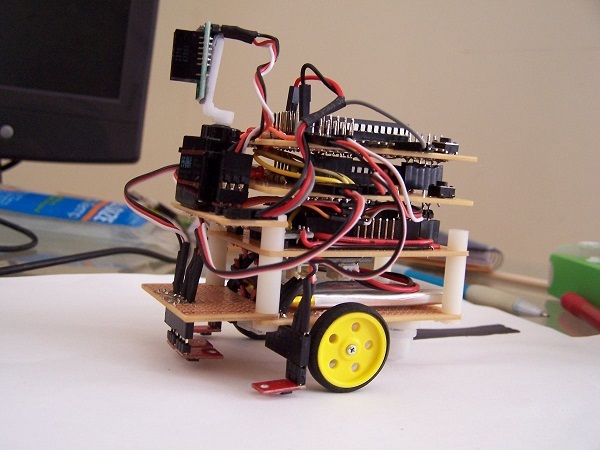
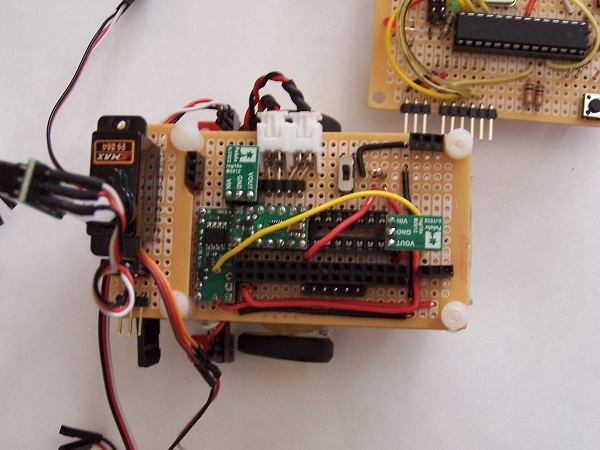
So far It’s all covered. The two QTR-1RC Reflectance Sensors cover the line following and the QTR-1A Reflectance Sensors are mounted wide in front of the wheels for analog grid squares on the line map to initiate different things like spinning in place, or initiating the eye before an obstacle course. The whole unit runs off a single 3.7v LiPol cell with separate drive and sensor/micro-controller circuits boosted to 5v. The gear drive units are perfect! full speed is actually a good 30% faster than I typically use. The motor driver seems quite happy with no noticeable temperature issues. The push button power switch circuit runs through each board and is a great unit.
All the Pololu components are top-notch and I appreciate the well though out component structure ( the 28 pin IC socket compatible motor drive break-out is perfect! ).
I’m just getting started with programing, probably need some help ![]() Looking forward to asking for that on the Pololu Forums.
Looking forward to asking for that on the Pololu Forums.
chj
sensors
-2x QTR-1RC Reflectance Sensor
-2x QTR-1A Reflectance Sensor
-1x Pololu Carrier with Sharp GP2Y0D810Z0F Digital Distance Sensor 10cm
power
-2x Pololu 5V Step-Up Voltage Regulator U1V10F5
-1x Pololu Pushbutton Power Switch SV
control
-1x DRV8835 Dual Motor Driver Carrier
drive
2x Solarbotics GM10 81:1 Geared Pager Motor
*Did not find any file or picture size rules…wanted people to be able to see it well.