I have a netduino and a MinIMU-9. I´ve tried to get the minimu to run but i have problems to get the right data.
So i checked the samplecode on github and converted it to c#.
The values i get did not make sense.
I hope someone could help.
The sources are placed by github, so that everyone could look at it and hopefully help.
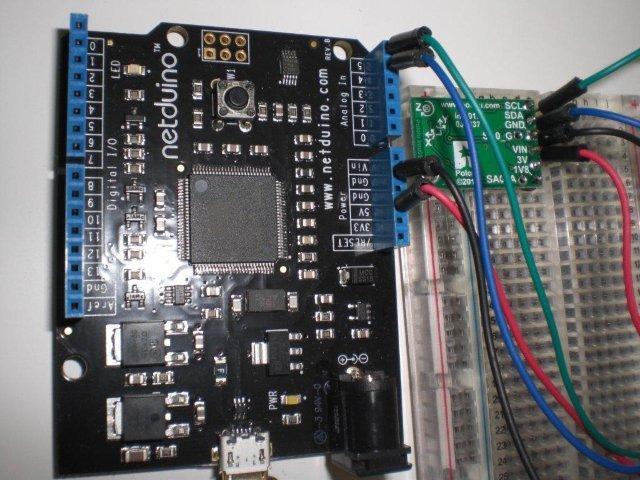
Your wiring looks fine to me. I am not excited about your whole approach to this problem. You ported a lot of code and then are looking at the final output and expecting it to be correct, and when it isn’t correct you are asking us to look through all your lines of code to find your problem. Can you focus in on one sensor that you think is wrong and investigate what is going on with that particular one? Just one line of debugging output is not useful. Try running it for a while, doing things with the sensor, and try to match your expectations to what you are getting. Some of your numbers look very high, like perhaps you are overflowing unsigned variables in the negative direction. If you are still having trouble discovering the problem, I recommend making simple programs that test a single part of your system and building up from there. For example, testing that you can read device address registers would let you know that your I2C communication is working correctly.
Hi Ryan,
Yes you are right, that was also my feelings to it, so i reduced it only to the magnetometer to see what i get.
I was looking for the max an min values and get the following:
xmin:4 ymin:5 zmin:1
xmax:65534 ymax:65532 zmax:65522
in some directions the value for the heading is jumping from 0 to 45. i don´t understand why.
Those numbers look normal. It sounds like you are expecting the gyro to tell you how much you have turned it (an angle). That is not what it measures; it measures how fast you are turning it (angular velocity). Keep in mind that the gyro will have a certain amount of noise and offset.