I have a small problem.
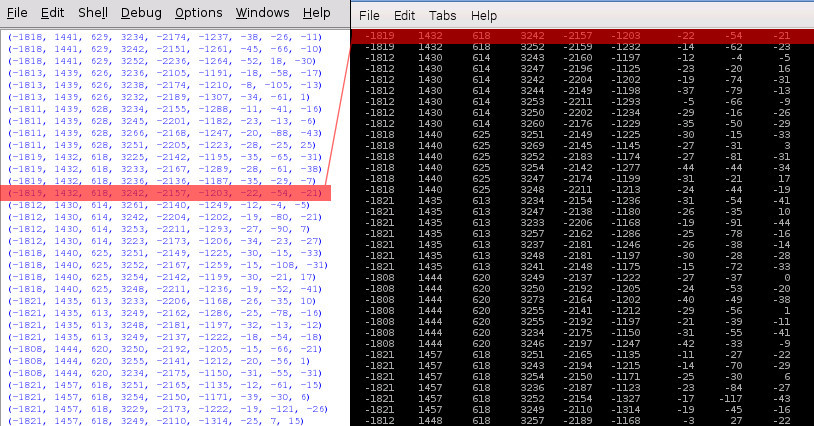
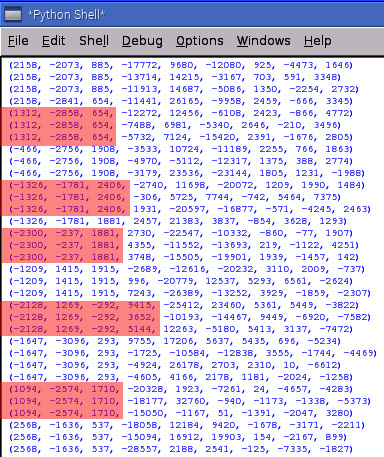
The magnetometer values change stepwise.
Here is a picture with the values and the python code.
Sorry my english is not so good.
Thank you.
import smbus
import time
bus = smbus.SMBus(1)
address = 0x1d
address2 = 0x6b
bus.write_byte_data(0x1d,0x20,0b10100111)
bus.write_byte_data(0x1d,0x21,0x00)
bus.write_byte_data(0x1d,0x24,0b01100100)
bus.write_byte_data(0x1d,0x25,0b00100000)
bus.write_byte_data(0x6b,0x20,0x0f)
def readSensorData():
MX1 = bus.read_byte_data(address, 0x08)
MX2 = bus.read_byte_data(address, 0x09)
MX = 256 * MX2 + MX1
if MX >= 32768:
MX= MX - 65536
else:
MX= MX
MY1= bus.read_byte_data(address, 0x0A)
MY2 = bus.read_byte_data(address, 0x0B)
MY = 256 * MY2 + MY1
if MY >= 32768:
MY= MY - 65536
else:
MY= MY
MZ1 = bus.read_byte_data(address, 0x0C)
MZ2 = bus.read_byte_data(address, 0x0D)
MZ = 256 * MZ2 + MZ1
if MZ >= 32768:
MZ= MZ - 65536
else:
MZ= MZ
AX1 = bus.read_byte_data(address, 0x28)
AX2 = bus.read_byte_data(address, 0x29)
AX = 256 * AX2 + AX1
if AX >= 32768:
AX= AX - 65536
else:
AX= AX
AY1= bus.read_byte_data(address, 0x2A)
AY2 = bus.read_byte_data(address, 0x2B)
AY = 256 * AY2 + AY1
if AY >= 32768:
AY= AY - 65536
else:
AY= AY
AZ1 = bus.read_byte_data(address, 0x2C)
AZ2 = bus.read_byte_data(address, 0x2D)
AZ = 256 * AZ2 + AZ1
if AZ >= 32768:
AZ= AZ - 65536
else:
AZ= AZ
GX1 = bus.read_byte_data(address2, 0x28)
GX2 = bus.read_byte_data(address2, 0x29)
GX = 256 * GX2 + GX1
if GX >= 32768:
GX= GX- 65536
else:
GX= GX
GY1 = bus.read_byte_data(address2, 0x2A)
GY2 = bus.read_byte_data(address2, 0x2B)
GY = 256 * GY2 + GY1
if GY >= 32768:
GY= GY- 65536
else:
GY= GY
GZ1 = bus.read_byte_data(address2, 0x2C)
GZ2 = bus.read_byte_data(address2, 0x2D)
GZ = 256 * GZ2 + GZ1
if GZ >= 32768:
GZ= GZ - 65536
else:
GZ= GZ
return MX, MY, MZ,AX, AY, AZ, GX, GY, GZ
while True:
SensorData = readSensorData()
print SensorData
time.sleep(0)