I am young person with Baby Orangutan B-328 and I would want you help me with a program for a robot that I make.
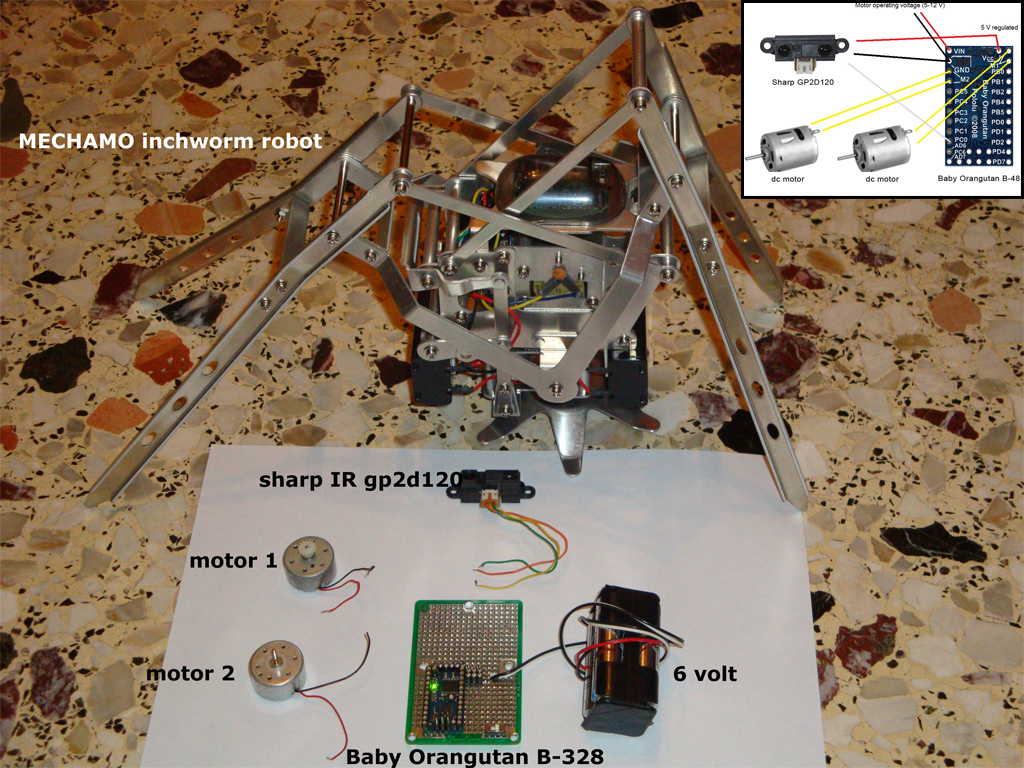
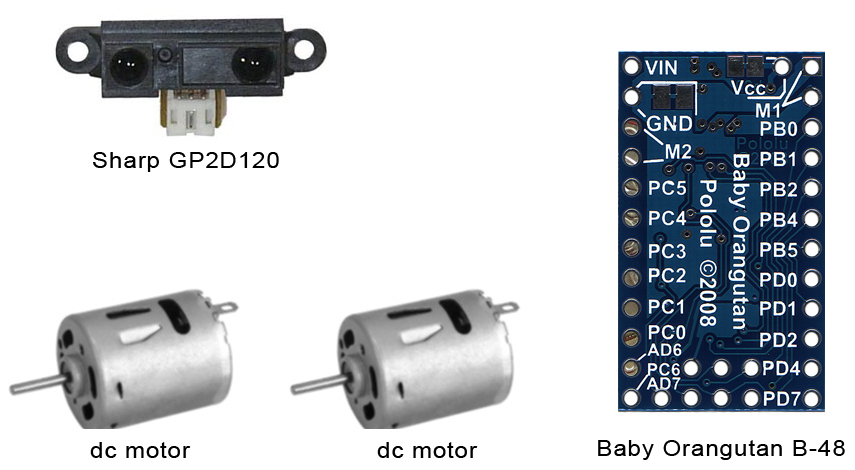
I have Gakken Mechamo Inchworm ( http://www.youtube.com/watch?v=iMQBKkDJY2c) and I would want to make him autonomous with Baby Orangutan B-328 and Sharp GP2D120 Infrared Sensor.
A program that I have thought has been the following:
Motor 1 movement front behind.
Motor 2 left right.
The robot is moved front with Motor 1, when finds obstacle the IR sensor Motor 1 makes little behind, stops and turns Motor 2 for 2 second accidental or left or right, stops and repeats the movement front in Motor 1.
Unfortunately I do not know by no means from planning and microcontrollers and for this I ask your help.
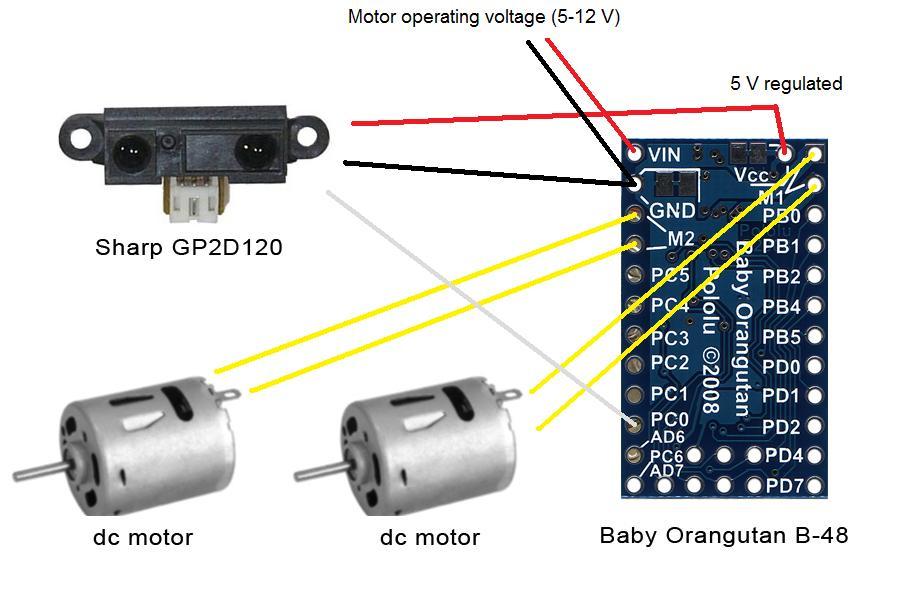
Have you taken a look at the documentation for the Baby Orangutan? We have a comprehensive user’s guide that you can find on the Resources tab of the product page. Since you went through the trouble of making such a nice image of your components, I wired them up in a way that should work. One key thing is that the signal wire of the Sharp distance sensor needs to be connected to an analog input. Also, you should avoid powering the motors with a voltage higher than the operating voltage of the motors because it might reduce the lifespan of your motors.
Thank you very much for the drawing, I have seen in forum everything with regard to Baby Orangutan but I cannot occupy because I do not know English , I am from Greece.
Now only that I need it is a small program in order to I make my robot autonomous, you can help me with the code?
To learn how to write a program for your Baby Orangutan, I recommend reading the Pololu AVR C/C++ Library User’s Guide. Please feel free to ask any specific questions you have here.
Actually, the Ping))) is slightly more complicated than the Sharp distance sensor. Once you plug in the sharp distance sensor, it will output an analog voltage on its signal (usually white) line. You’ll want to use analog_read_average function to read the analog voltage.
Have you successfully put a program on your Baby Orangutan? I would start with the Blink LED program available on the Baby-O’s resources page. Be sure to get the one that is correct for your MCU (48, 168, or 328).
Have you read through the Pololu Avr C/C++ Library User’s Guide? There is a section on controlling the motors. Try hooking up one of your DC motors with connections like I drew, and modify the program in that section of the user’s guide to make your motor do what you want it to do. After you have a good idea of how to control both of your motors with code, you can move on to reading the sensor.
If you have any specific questions about the motor program, feel free to ask them.
Connecting the two motors as you plan and put some programs from the Pololu Avr C/C++ Library User’s Guide, and motor responding.
But I can not find a program for the Sharp GP2D120 Infrared Sensor.
Can you help please?
Ryan, I do not know to do this … I do not know any programming …
I have connected everything as your project but I do not know any program to do the robot to work, can you help with a program?
A program that I have thought has been the following:
Motor 1 movement front behind.
Motor 2 left right.
The robot is moved front with Motor 1, when finds obstacle the IR sensor Motor 1 makes little behind, stops and turns Motor 2 for 2 second accidental or left or right, stops and repeats the movement front in Motor 1.
The Pololu AVR library has lots of code examples, including ones that read analog voltages like the Sharp Distance Sensor puts out. You need to take the time to read through those examples and try to learn from them. If you don’t understand part of the example, ask specific questions about what you don’t understand. We cannot write an entire program from scratch for you, especially when we’ve already put a lot of effort into providing general-purpose examples that can serve as starting points for your own application.
If you want to hack an existing product to make it autonomous, you have to be willing to put in some work, and the result will be much more satisfying to you if you understand what you’re doing. I recommend you take the time to learn a little bit about how to program in C by using our code examples as a starting point, and then learn about them by tweaking them slightly to change what they do. As you get more comfortable with C, you will be able to write your own program to control your robot, and you’ll know enough to then modify that program to change the behavior as desired.


 , I am from Greece.
, I am from Greece.