I’m working in system that will used a huge amount of DC motors 37Dx52L. For the scaled prototype we ordered 36 motors from the german dealer.
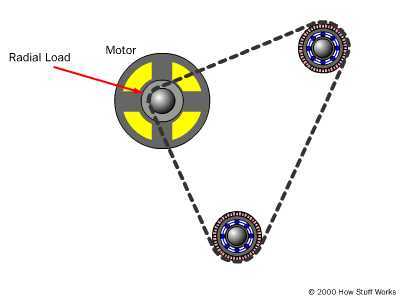
The motors will be used in a similar configuration as shown in this pic:
Source:http://science.howstuffworks.com/transport/engines-equipment/bearing2.htm
In order to dimension the machine properly, we need to know how much is the max load in radial and axial directions at the output axle.
Sadly, this information is not included in the motor specs and the german dealer was not able to provide this information.
Could some one tell me which are the max radial and axial loads?
Are you pushing things into the motor, or pulling things out, or just worrying about the sideways (radial, normal to the axle) load?
For radial load, I would guesstimate by looking up 6mm inner diameter ball bearings, finding the cheapest version, and looking at their rated capacity, then divide by half. Or perhaps open up one of the motors, look at the bearing, and see if you can figure out which specific bearing it is?
If you will put substantial load on the axle, I would suggest putting another ball bearing on the other end of the load – perhaps even a bearing on either end, to de-couple the motor. That way, you can define the load capacity yourself by just choosing the appropriate bearings.
Here’s one such bearing: vxb.com/page/bearings/PROD/kit9466
Rated at 440 N static load.
There are lower-cost bearings on that site, too, but they don’t display a rating. And I don’t know how good a comparison this is, anyway – if our Pololu friends could give the real specs, that would be great!
Basically I will have an radial load in the output axle, since I’ll be using a pulley-belt konstruktion.
The axial load is not as important in this case, but we might use the motor for other machines in other configurations.
The radial load is not that big. If I could spare the de-coupling of the motor, it would be great. That way we could cut building costs (we neer really a lot of motors!)
@POLOLU: Could you provide the max load information?
Unfortunately, we do not have axial and radial load ratings characterized for our gearmotors; all the information we have for them is on the Specifications tab of their product pages.
You said it was a prototype, so build cost will be high anyway. You will probably have other problems if it’s a prototype, and you probably will not want to waste time tracking down the problem to being a lack of bearings (especially as that will show up in having slightly but not obviously higher current loads, some motors that are working and some that are not, and “it was working yesterday, and it’s not working today???” moments.)
The motors are ~$20 each, and bearings are <$5, often $2-3/ea
It is most likely you will save headaches to add some bearings. If the loads truly are not very high, and distributed over many motors, and if your prototype doesn’t need to survive more than a year, than you might be able to get away without bearings.
If you need to reduce costs, a lot of my personal projects I adapt features to accommodate bulky ABEC skate bearings because they’re very high good, and cheap and easy to source at high grades. A more professional application might prefer smaller bearings (but I don’t have a stock of those.)
From experience, the smaller versions of those motors are (15.5D) are very sensitive to axial load- the gears will grind quickly without thrust bearings. they are more robust to radial loads, though I don’t remember any bearing when I took it apart.
The 37D motors are obviously beefier, we are using them in an axial loaded application, but added an additional radial bearing. that seems to make sense; while pricier than not having that component, is still much cheaper than a $200 maxxon motor