
I am working a Remote Control Giant Scale P-51 Mustang in the Miss America Color Scheme to be completed for a 4th of July 2020 Party, using a Spektrum 12 Channel Remote Control Receiver. After racking my head around working 16-18 channels into a 12 Channel Receiver, I found your products and became extremely excited, bringing back an ancient love interest in electronics and robotics. The Landing Gear and Gear Doors/lights/radiator doors were stressing me out, then Suddenly my project had an (very) EXCITING answer.
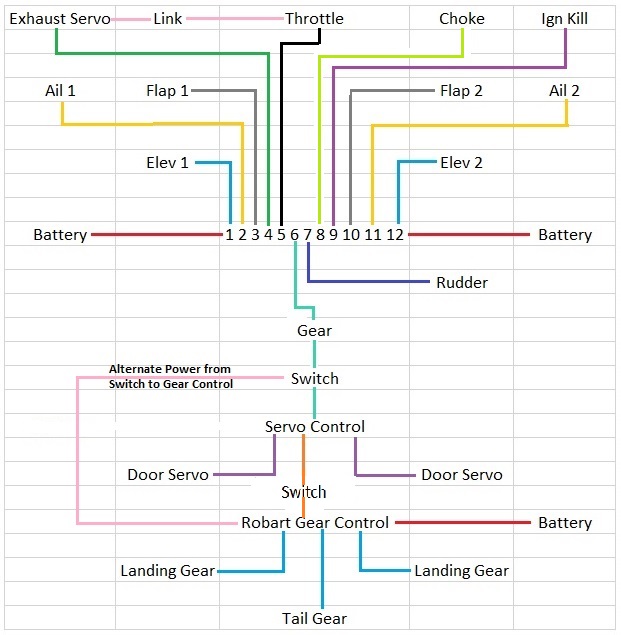
- Gear Switch from Spektrum RX to RC Switch with Medium Low-Side MOSFET
- RC Switch with Medium Low-Side MOSFET to Mini Maestro 18-Channel USB Servo Controller (GND,VIN,RX)
- 2 seperate channels/servos controling the Gear Doors and other parts (ch 12-16)
- 1 channel (ch 17) to a Robart Electric Gear Control Box that seperatly controls the main landing gear and tailwheel
- May have to use a seperate digital switch between the Maestro Controller and the Robart Electric Gear Control Box
I am not new to computer scripting, however I am very new to the language of the Maestro Controller. The scripting of the Gear Sequence should be pretty straight forward however I am (after several weeks of reading and researching) stumped on how to, within the constraints of the Maestro Control Center Script IDE, read the status of the the rx port on the Maestro Controller to trigger the landing gear sequence up or down based on the switch from the Remote Control Transmitter (Spektrum iX12). I have read the user’s guide and understand that there is a ttl serial command using the RX/TX lines on the Maestro Controller but I am not seeing how to read the RX line status via the control center script.
Could someone point me in the right direction. What is it that I am missing here?
Thanks,
Jerry