Hi, I have started a project with my old RC car, I bought my a Raspberry Pi 3 and a Mirco Maestro 6-channel. I want to run my RC car over the web (4g / 3g / LTE) but since I’m not so knowledgeable inomd this area so I could really use some help with this … The problem I come across now is how I can control car servos via a local web interface.
I guess I need to use / code in (.py)
someone please have the desire to help me with this, I would really be eternally grateful if someone wants to help me because I have dreamed of being able to do this project. Thx
It is difficult to help you with such a broad question. There are many ways to approach your project, and we do not have any tutorials for an application like that. I suggest reading this forum post about getting technical help and then asking more directed questions.
Since your project is complex, I suggest breaking it down into smaller parts like getting the Maestro servo controller to work with your servos using the Maestro Control Center or UscCmd (the Maestro’s command-line utility) before adding more devices to your setup.
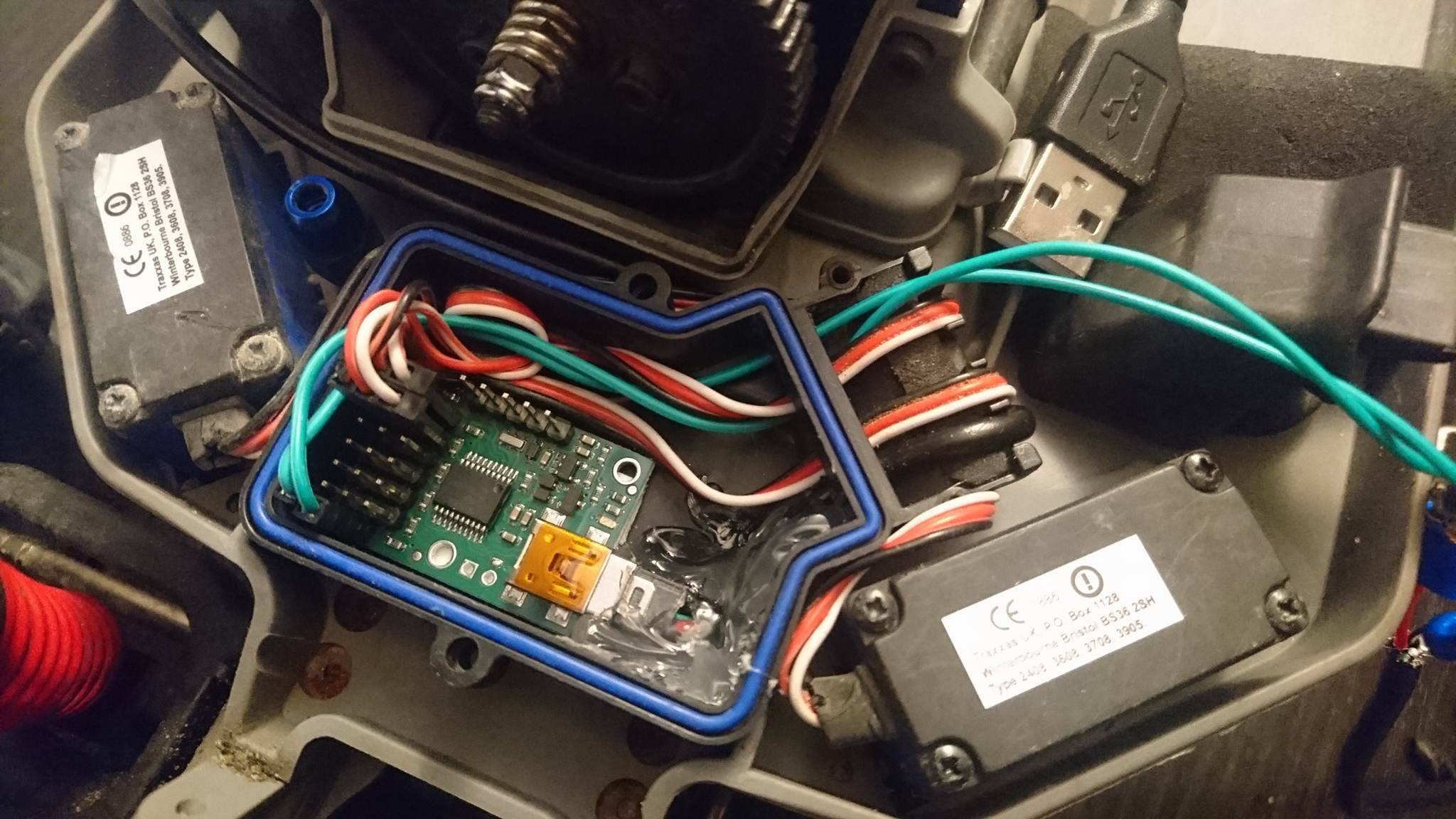
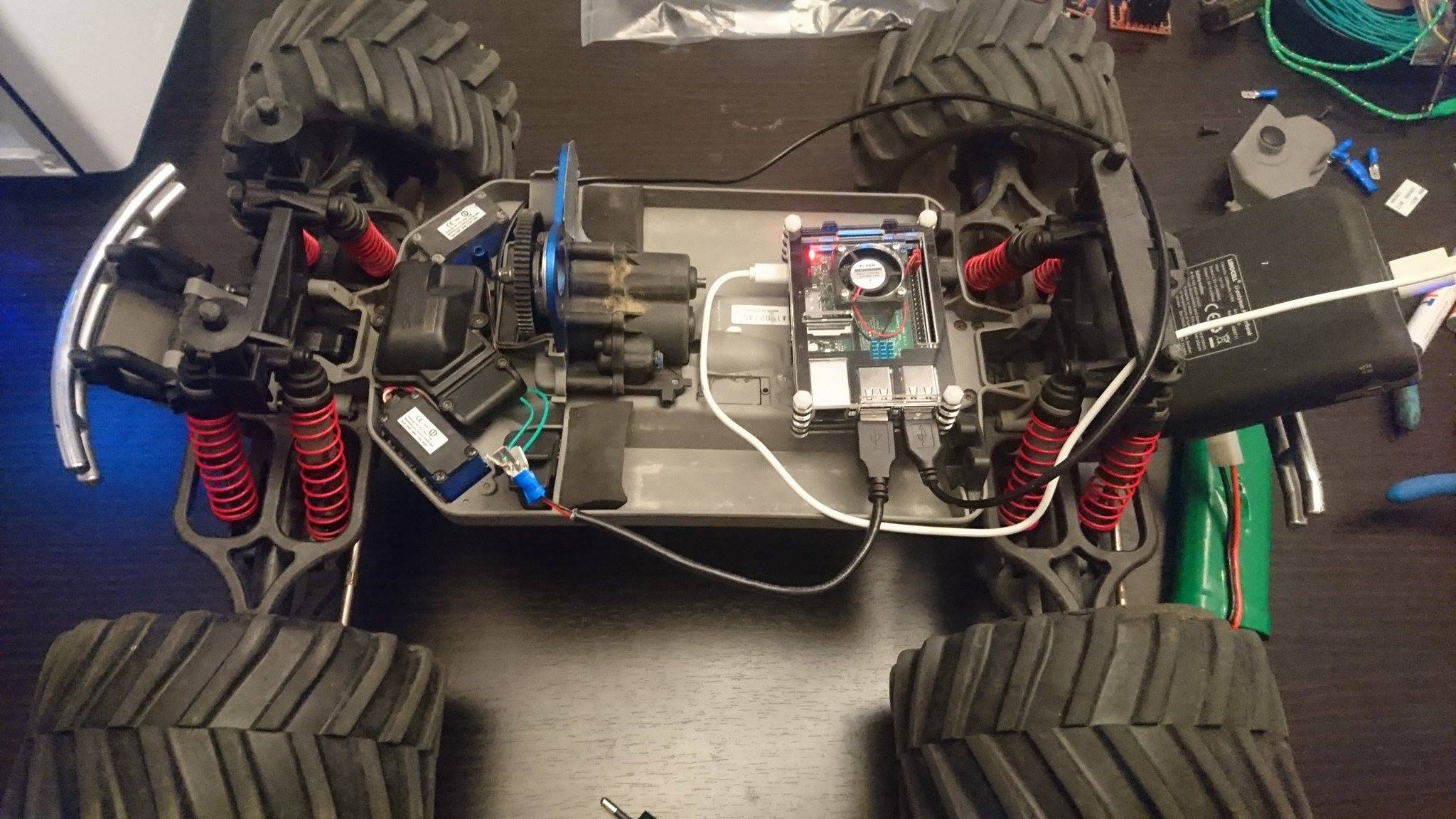
By the way, from your pictures, it looks like you are supplying power from your Raspberry Pi USB port to the servos. According to the table under the “What are the power requirements?” FAQ on the Raspberry Pi official site, the maximum total USB peripheral current draw for the Raspberry Pi 3 is rated for 1.2A. I do not know the maximum current draw for each of your servos, but a good rule of thumb is to budget 1A per standard RC hobby servo, so you might consider powering the servos from an external power supply instead of the USB port on your Raspberry Pi. You might also consider posting a wiring diagram of your setup, because it is hard to see how everything else is connected from your pictures.
I am currently attempting to do the same thing, but you are ahead if me
How are things going with your project
I am good at web stuff, a little slow on electrical stuff
Hi! Im in progress with controling the car with a wired xbox controller. I use java script to control the servos. Havent start making the custom webpage yet.