
Here is what i did.
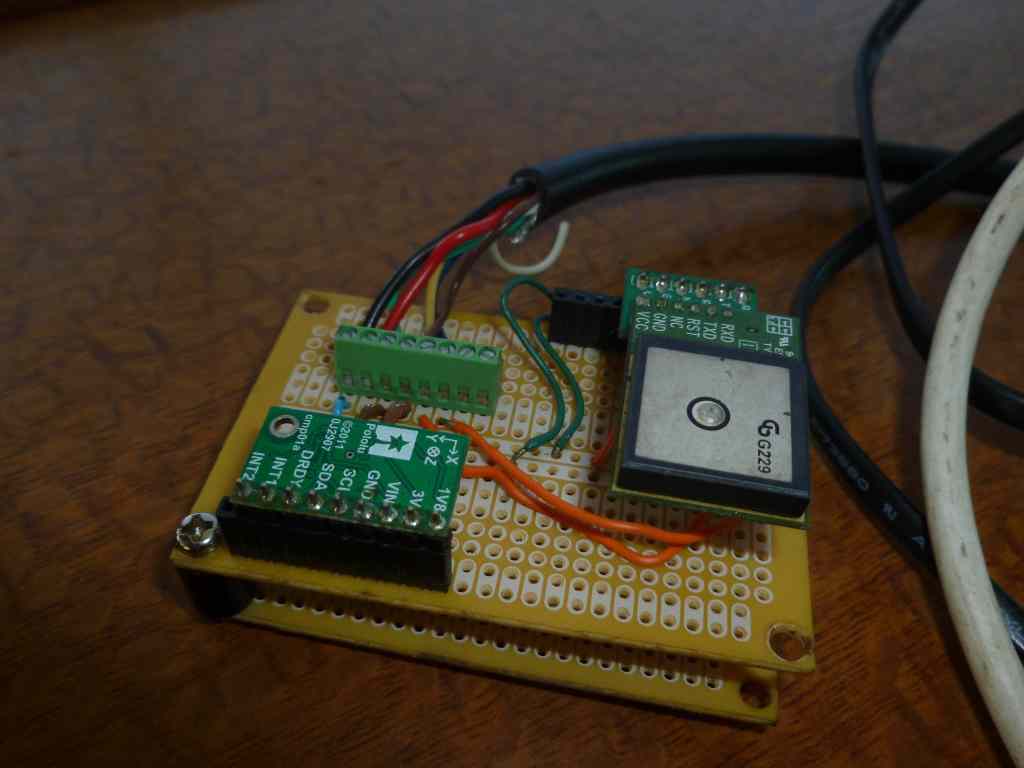
If it is upside down, does it matter?
UPDATE: I see you have them installed this way in your product descriptions, but question still stands. do the chips expect to be mounted rightside up?
john
Here is what i did.
If it is upside down, does it matter?
UPDATE: I see you have them installed this way in your product descriptions, but question still stands. do the chips expect to be mounted rightside up?
john
Hello John,
The LSM303 board measures acceleration and magnetic field strength along 3 axes. There is nothing inherent in the sensor that requires it to be in any particular orientation. So, flipping or reorienting the board so that the sensor faces the ground will just reverse the direction of your readings.
Thanks much Jonathan. I’ve been working on this project since january, and now that it’s mostly working, i need to install the compass where it’s going and calibrate it. i also have an hmc6352 which I’m going to use as a standby and to compare to see how much an issue tilt-compensation really is for my application.
best regards,
john ferguson
one other possibly stupid question. board with the lsm303 and the gps is going to be installed on our boat - it won’t be the primary navigation info source. But, it would be handy if I were able to get the most out of the installation.
I will mount the lsm303 with the X axis in line with axis of the boat with the arrow forward. Then I will run the callibration routine by enabling the routine, and turning the boat in slow circles - maybe 720 degrees worth. I will then transfer the last figures shown to the init routine in my compass-read setup. After doing this, I will fire it up. I am anticipating that I will get a heading reading that is off from that of the boat. Is this a reasonable expectation?
If it is likely to point close to the boat’s heading, I’ll be in clover, but if it indicates 240 degrees when the actual boat heading is 270, can I just add the correction to the code? If the necessary correction varies with heading, I could certainly construct a correction routine to bring it into line.
Does any of this make sense, or am i just worrying needlessly?
thanks for bearing (so to speak) with me on this.
john ferguson
Your expectation sounds reasonable, although it is hard to say whether the results will be good enough for your needs. The calibration method we use in our code examples generally seems to work fairly well, but we have not characterized how accurate the resulting compass headings are, and the results sometimes seem to depend on the particular unit. If the error does not seem to be easily correctable, you might have to look for or develop a better calibration method to get the accuracy you are looking for.
Let us know how it goes when you give it a try.
jon,
not to worry. anything 10 degrees or better will be fine. I’ll be delighted to share my results with you guys - more weeks of messing with it though.
best, john