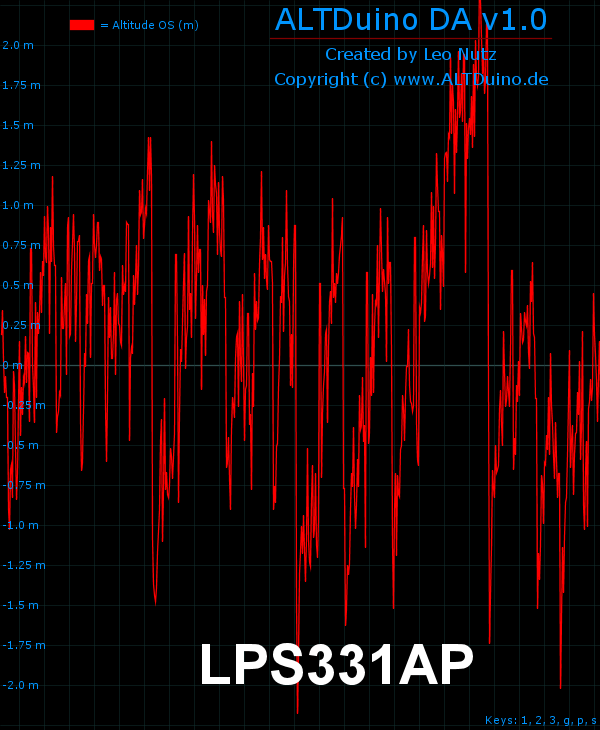
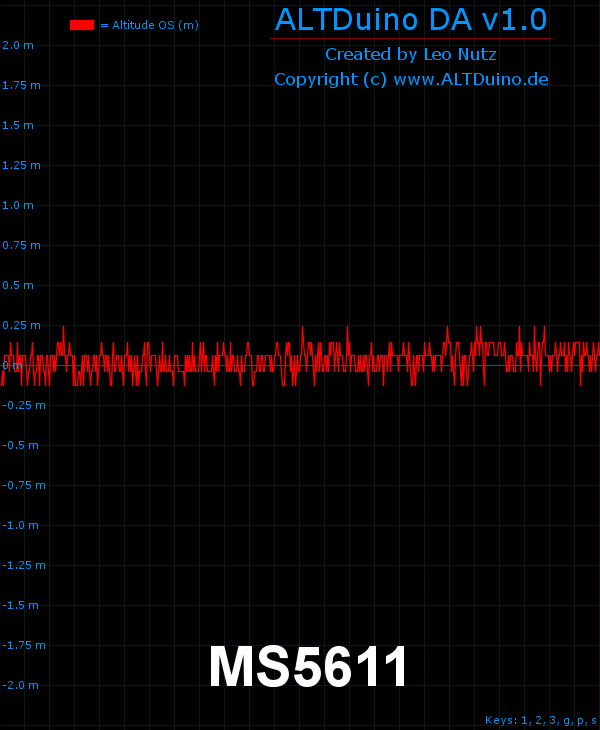
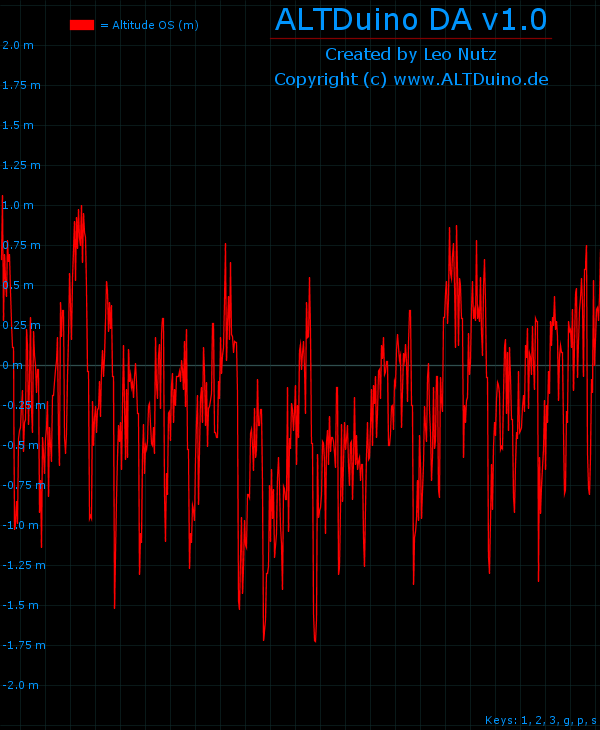
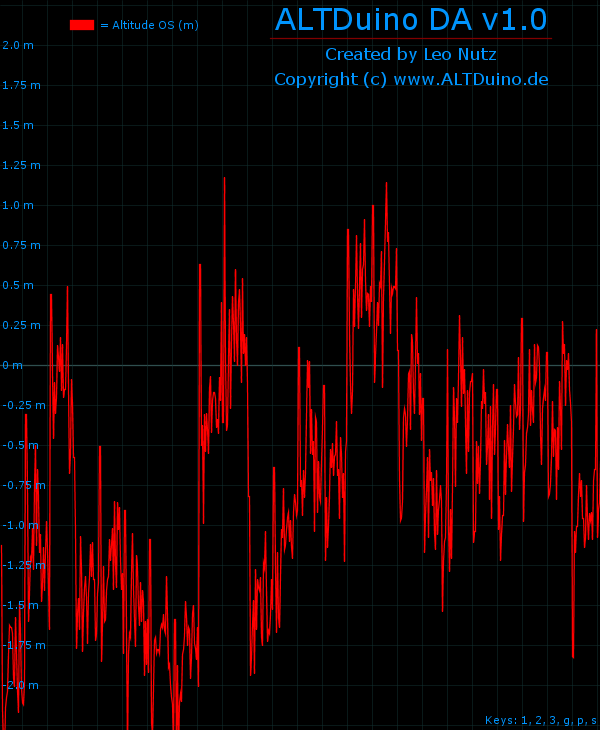
@Ben:
There is no scaling error. Both graphs are done with the same code. The altitude is being calculated using the same formula and the sensor is stationary. What you are seeing is more or less the sensor noise in meters
@Kevin:
I didn’t want to confuse you with my “Wire.write(0x20); Wire.write(0b11000000);” declaration. I did make the changes as you suggested through out my tests with the same results.
Let’s break it down to a simple test mainly because I only have one sensor and now need to eliminate the possibily of having received a defective sensor.
Here the sligthly modified code that I’d like someone to run for 30 seconds.
SerialMetric
#include <Wire.h>
#include "LPS331.h"
LPS331 ps;
int Case_Counter = 0;
float baseAltitude = 0;
float pressure = 0;
void setup()
{
Serial.begin(9600);
Wire.begin();
pinMode(13, OUTPUT); // Sets the digital pin as output
if (!ps.init())
{
Serial.println("Failed to autodetect pressure sensor!");
while(1);
}
ps.enableDefault();
float pressure = ps.readPressureMillibars();
baseAltitude = ps.pressureToAltitudeMeters(pressure);
}
void loop()
{
int time = millis();
pressure = ps.readPressureMillibars();
float altitude = ps.pressureToAltitudeMeters(pressure) - baseAltitude;
float temperature = ps.readTemperatureC();
Case_Counter++; // Increase counter by 1
Serial.print(temperature); Serial.print("\t");
Serial.print(pressure); Serial.print("\t");
Serial.print(0); Serial.print("\t");
Serial.print(altitude); Serial.print("\t");
Serial.print(0); Serial.print("\t");
Serial.print(0); Serial.print("\t");
Serial.print(Case_Counter); Serial.print("\t");
Serial.print("\r\n");
if(Case_Counter == 25) // Flash LED every 1 second
{
digitalWrite(13, !digitalRead(13)); // Toggle LED on/off to signal flight readiness
Case_Counter = 0; // Reset to 0
}
int measured = millis() - time;
delay(40 - measured);
}
LPS331.ccp
#include "LPS331.h"
#include <Wire.h>
// Defines ///////////////////////////////////////////////////////////
// The Arduino two-wire interface uses a 7-bit number for the address,
// and sets the last bit correctly based on reads and writes
#define LPS331AP_ADDRESS_SA0_LOW 0b1011100
#define LPS331AP_ADDRESS_SA0_HIGH 0b1011101
// Constructors //////////////////////////////////////////////////////
LPS331::LPS331(void)
{
// Pololu board pulls SA0 high, so default assumption is that it is
// high
address = LPS331AP_ADDRESS_SA0_HIGH;
}
// Public Methods ////////////////////////////////////////////////////
// sets or detects slave address; returns bool indicating success
bool LPS331::init(byte sa0)
{
switch(sa0)
{
case LPS331_SA0_LOW:
address = LPS331AP_ADDRESS_SA0_LOW;
return testWhoAmI();
case LPS331_SA0_HIGH:
address = LPS331AP_ADDRESS_SA0_HIGH;
return testWhoAmI();
default:
return autoDetectAddress();
}
}
// turns on sensor and enables continuous output
void LPS331::enableDefault(void)
{
// writeReg(LPS331_CTRL_REG1, 0b11100000); // 12,5 12,5
writeReg(LPS331_CTRL_REG1, 0b11000000); // 25 1
// writeReg(LPS331_CTRL_REG1, 0b11010000); // 7 7
}
// writes register
void LPS331::writeReg(byte reg, byte value)
{
Wire.beginTransmission(address);
Wire.write(reg);
Wire.write(value);
Wire.endTransmission();
}
// reads register
byte LPS331::readReg(byte reg)
{
byte value;
Wire.beginTransmission(address);
Wire.write(reg);
Wire.endTransmission(false); // restart
Wire.requestFrom(address, (byte)1);
value = Wire.read();
Wire.endTransmission();
return value;
}
// reads pressure in millibars (mbar)/hectopascals (hPa)
float LPS331::readPressureMillibars(void)
{
return (float)readPressureRaw() / 4096;
}
// reads pressure in inches of mercury (inHg)
float LPS331::readPressureInchesHg(void)
{
return (float)readPressureRaw() / 138706.5;
}
// reads pressure and returns raw 24-bit sensor output
int32_t LPS331::readPressureRaw(void)
{
Wire.beginTransmission(address);
// assert MSB to enable register address auto-increment
Wire.write(LPS331_PRESS_OUT_XL | (1 << 7));
Wire.endTransmission();
Wire.requestFrom(address, (byte)3);
while (Wire.available() < 3);
uint8_t pxl = Wire.read();
uint8_t pl = Wire.read();
uint8_t ph = Wire.read();
// combine bytes
return (int32_t)(int8_t)ph << 16 | (uint16_t)pl << 8 | pxl;
}
// reads temperature in degrees C
float LPS331::readTemperatureC(void)
{
return 42.5 + (float)readTemperatureRaw() / 480;
}
// reads temperature in degrees F
float LPS331::readTemperatureF(void)
{
return 108.5 + (float)readTemperatureRaw() / 480 * 1.8;
}
// reads temperature and returns raw 16-bit sensor output
int16_t LPS331::readTemperatureRaw(void)
{
Wire.beginTransmission(address);
// assert MSB to enable register address auto-increment
Wire.write(LPS331_TEMP_OUT_L | (1 << 7));
Wire.endTransmission();
Wire.requestFrom(address, (byte)2);
while (Wire.available() < 2);
uint8_t tl = Wire.read();
uint8_t th = Wire.read();
// combine bytes
return (int16_t)(th << 8 | tl);
}
// converts pressure in mbar to altitude in meters, using 1976 US
// Standard Atmosphere model (note that this formula only applies to a
// height of 11 km, or about 36000 ft)
// If altimeter setting (QNH, barometric pressure adjusted to sea
// level) is given, this function returns an indicated altitude
// compensated for actual regional pressure; otherwise, it returns
// the pressure altitude above the standard pressure level of 1013.25
// mbar or 29.9213 inHg
float LPS331::pressureToAltitudeMeters(float pressure_mbar, float altimeter_setting_mbar)
{
return (1 - pow(pressure_mbar / altimeter_setting_mbar, 0.190263)) * 44330.8;
}
// converts pressure in inHg to altitude in feet; see notes above
float LPS331::pressureToAltitudeFeet(float pressure_inHg, float altimeter_setting_inHg)
{
return (1 - pow(pressure_inHg / altimeter_setting_inHg, 0.190263)) * 145442;
}
// Private Methods ///////////////////////////////////////////////////
bool LPS331::autoDetectAddress(void)
{
// try each possible address and stop if reading WHO_AM_I returns the expected response
address = LPS331AP_ADDRESS_SA0_LOW;
if (testWhoAmI()) return true;
address = LPS331AP_ADDRESS_SA0_HIGH;
if (testWhoAmI()) return true;
return false;
}
bool LPS331::testWhoAmI(void)
{
return (readReg(LPS331_WHO_AM_I) == 0xBB);
}
LPS331.h
#ifndef LPS331_h
#define LPS331_h
#include <Arduino.h> // for byte data type
// SA0 states
#define LPS331_SA0_LOW 0
#define LPS331_SA0_HIGH 1
#define LPS331_SA0_AUTO 2
// register addresses
// Note: Some of the register names in the datasheet are inconsistent
// between Table 14 in section 6 and the register descriptions in
// section 7. Where they differ, the names from section 7 have been
// used here.
#define LPS331_REF_P_XL 0x08
#define LPS331_REF_P_L 0x09
#define LPS331_REF_P_H 0x0A
#define LPS331_WHO_AM_I 0x0F
#define LPS331_RES_CONF 0x10
#define LPS331_CTRL_REG1 0x20
#define LPS331_CTRL_REG2 0x21
#define LPS331_CTRL_REG3 0x22
#define LPS331_INTERRUPT_CFG 0x23
#define LPS331_INT_SOURCE 0x24
#define LPS331_THS_P_L 0x25
#define LPS331_THS_P_H 0x26
#define LPS331_STATUS_REG 0x27
#define LPS331_PRESS_OUT_XL 0x28
#define LPS331_PRESS_OUT_L 0x29
#define LPS331_PRESS_OUT_H 0x2A
#define LPS331_TEMP_OUT_L 0x2B
#define LPS331_TEMP_OUT_H 0x2C
#define LPS331_AMP_CTRL 0x30
#define LPS331_DELTA_PRESS_XL 0x3C
#define LPS331_DELTA_PRESS_L 0x3D
#define LPS331_DELTA_PRESS_H 0x3E
class LPS331
{
public:
LPS331(void);
bool init(byte sa0 = LPS331_SA0_AUTO);
void enableDefault(void);
void writeReg(byte reg, byte value);
byte readReg(byte reg);
float readPressureMillibars(void);
float readPressureInchesHg(void);
int32_t readPressureRaw(void);
float readTemperatureC(void);
float readTemperatureF(void);
int16_t readTemperatureRaw(void);
static float pressureToAltitudeMeters(float pressure_mbar, float altimeter_setting_mbar = 1013.25);
static float pressureToAltitudeFeet(float pressure_inHg, float altimeter_setting_inHg = 29.9213);
private:
byte address;
bool autoDetectAddress(void);
bool testWhoAmI(void);
};
#endif
Please post the results here so that I can run it through my graph program.
Thanks.
Leo