
Hello, vaQlab.
I’m sorry you are having trouble with the jrk.
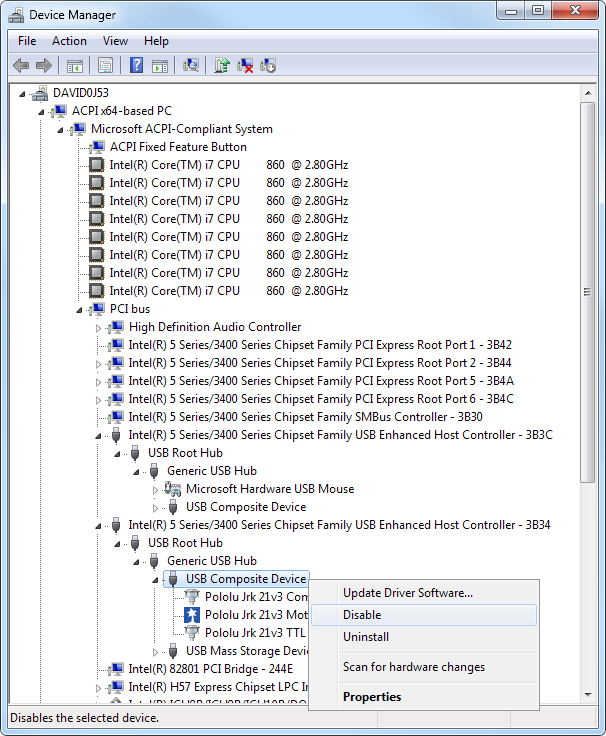
The next time the error happens, there is something I would like you to try that should give us more information: Please open up the Device Manager (run devmgmt.msc or find it in your Control Panel). Select View → Devices by Connection. Find the entry that says “Pololu Jrk 21v3 Motor Controller”. The screenshot below shows you where I found it on my computer, and your computer is probably similar. The parent device of that entry should be named “USB Composite Device”. Do you see these entries in the Device Manager? Does it look like the screenshot below? Close your VBA program, close the Jrk Configuration Utility, and close any other program that might be using the jrk. Right-click on that USB Composite Device and select “Disable” to disable it. The three devices under it should disappear. Then right-click on it and select “Enable” to re-enable it. Does this solve the problem? Does the jrk’s green LED come back on? Can you now control it from the jrk configuration utility?
I suspect that some of kind of electrical disturbance is reaching the PC and causing it to shut off its USB port. You might be able to avoid this problem by putting a powered USB hub between the jrk and the computer. Unfortunately, the jrk’s native USB interface, which you are using, probably does not work well with some hubs we have tried such as the D-LINK DUB-H7 and we’re not sure why, so that might be another problem to overcome.
–David