I have been working on a new interface board for the Jetson TK1 embedded supercomputer called the Jetduino. It makes it very easy to build robots that can use the parallel processing capabilites of the NVIDIA GPU for vision and neural neural networks.
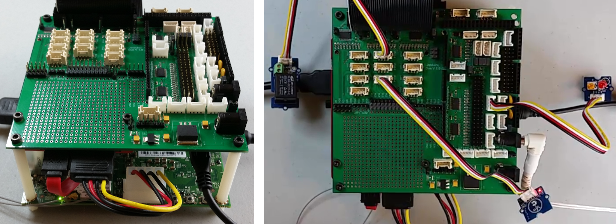
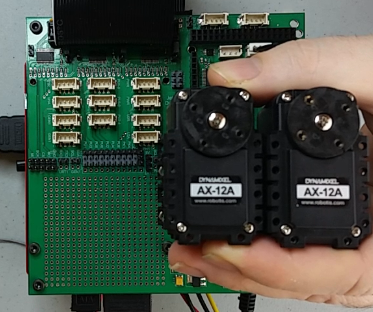
The Jetduino mounts above the Jetson and has a small connector that fits in the 2mm J3A connectors. A Raspberry Pi GPIO ribbon cable then connects it to the Jetduino. It has mounting points for a 2.5" HD, wireless antennas, a large proto-typing area, and a built-in shield for an Arduino Due. Just like the GrovePi for the Rapsberry Pi, you can use Python and C libraries to talk directly to the Arduino to set and receive digital and analog data. You can also control regular and smart servos. It has numerous Grove and RobotGeek connectors for modular sensors and motor actuators. I just put out a new blog post and two YouTube videos showing how to setup the Jetduino and perform digital I/O with 12 of the Jetson TK1 GPIO lines, and the 54 lines available on the Due. I am working on videos to show off the other features as well. If you would like to be notified when these are available please sign up for my newsletter. I plan to launch a crowdfunding campaign to get the Jetduino produced sometime in March or April, and I will need the help of any makers out there who want to make it easier to build robots or electronic projects with the awesome Jetson TK1.
Awesome project! That’s great that you are making the NVIDIA Jetson TK1 board more accessible to use for robot enthusiasts. It would be great to see an update once you start your crowd-funding campaign!
I have a TK1 myself, and I am looking forward to seeing Jetduino’s end result.
Thanks! I will be sure to post updates as it develops. In fact, I just posted a new blog/video showing how to use the 12 analog inputs and 14 analog outputs (12 PWM and 2 dedicated 12-bit DACs) that are available with the Jetduino on the Jetson TK1. I also show how easy it is to use some of the other Grove modules like the temperature sensor and an OLED display.
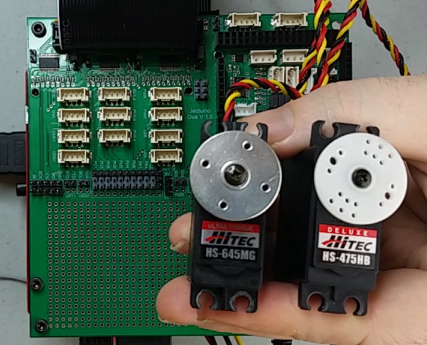
I just posted a new video and blog entry showing how easy it is to control up to 12 standard servos with the Jetson TK1 & Jetduino. The Jetduino is a robotics interface board for the Jetson TK1 embedded supercomputer. It makes it very easy to build robots that can use the parallel processing capabilites of the NVIDIA GPU for vision and neural networks. If you would like to be kept up to date on the progress of this project please sign up for my newsletter. I plan to launch a crowdfunding campaign to get the Jetduino produced sometime in March or April, and I will need the help of any makers out there who want to make it easier to build robots or electronic projects with the awesome Jetson TK1.
Thank you for keeping us updated with the Jetduino progress. I have merged your recent post about Jetduino into your original thread to keep things organized. Please keep posting updates about your interface board for the Jetson TK1 in this thread.
I just launched a contest where you can enter to win a prototype Jetduino board. You can find details about the Jetduino and enter the contest on the product page.