
𝐈 𝐰𝐚𝐧𝐭 𝐭𝐨 𝐢𝐧𝐭𝐫𝐨𝐝𝐮𝐜𝐞 𝐦𝐲 𝐫𝐨𝐛𝐨𝐭 𝐭𝐡𝐚𝐭 𝐈 𝐝𝐞𝐯𝐞𝐥𝐨𝐩𝐞𝐝 𝐝𝐮𝐫𝐢𝐧𝐠 𝐦𝐲 𝐬𝐮𝐦𝐦𝐞𝐫 𝐡𝐨𝐥𝐢𝐝𝐚𝐲 ![]()
![]()
![]() My robot’s name is Alexandrabot.
My robot’s name is Alexandrabot.
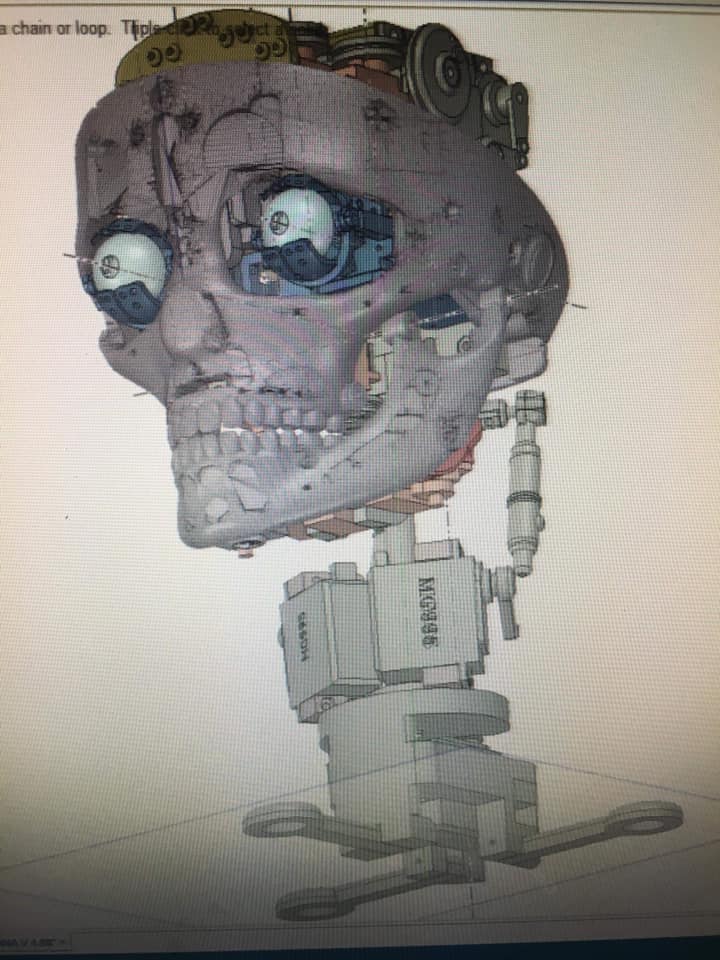
![]() Below is the full design of my robot head on SpaceClaim. It took me an entire 3 months to learn SpaceClaim from scratch and design it.
Below is the full design of my robot head on SpaceClaim. It took me an entire 3 months to learn SpaceClaim from scratch and design it.

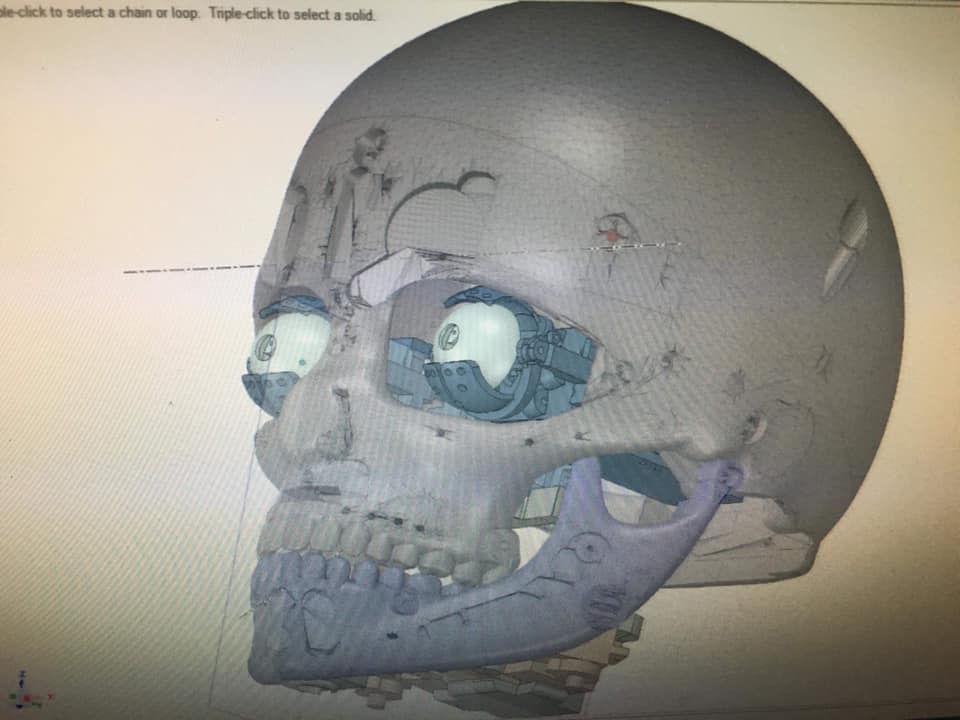
![]() There are roughly 100 3D pieces, 30 servos (SG92R for the head and eyes, MG995 for the neck), and 1 Arduino mega board.
There are roughly 100 3D pieces, 30 servos (SG92R for the head and eyes, MG995 for the neck), and 1 Arduino mega board.

![]() After that, I create 𝐚 𝐒𝐔𝐏𝐄𝐑 𝐀𝐫𝐭𝐢𝐟𝐢𝐜𝐢𝐚𝐥 𝐈𝐧𝐭𝐞𝐥𝐥𝐢𝐠𝐞𝐧𝐜𝐞 𝐂𝐡𝐚𝐭𝐛𝐨𝐭 to implement into my robot head. I started to learn Python and coding for roughly 6 months. Up till now, Alexandrabot has an impressive amount of gigabytes of knowledge.
After that, I create 𝐚 𝐒𝐔𝐏𝐄𝐑 𝐀𝐫𝐭𝐢𝐟𝐢𝐜𝐢𝐚𝐥 𝐈𝐧𝐭𝐞𝐥𝐥𝐢𝐠𝐞𝐧𝐜𝐞 𝐂𝐡𝐚𝐭𝐛𝐨𝐭 to implement into my robot head. I started to learn Python and coding for roughly 6 months. Up till now, Alexandrabot has an impressive amount of gigabytes of knowledge.

![]() To see more of my project Alexandrabot (3D design pictures, videos of robot movements, what is implemented in the bot, etc.) or chat with the AI bot, you guys can visit my website and click on “Chatting with Alexandrabot” at the bottom of the screen: https://alexandrabot.com. Feel free to ask me anything re the robot.
To see more of my project Alexandrabot (3D design pictures, videos of robot movements, what is implemented in the bot, etc.) or chat with the AI bot, you guys can visit my website and click on “Chatting with Alexandrabot” at the bottom of the screen: https://alexandrabot.com. Feel free to ask me anything re the robot.
![]() I also have a question too re Arduino and the servos, “Does anyone has a solution to reduce the sound that the servos make?”
I also have a question too re Arduino and the servos, “Does anyone has a solution to reduce the sound that the servos make?”