EDIT: I tried using pins PE0/PE1 (digital pins 22/23) and still no luck.
I’m using the 5V 16Mhz version of the A*328PB Micro and want to use pins PE2 & PE3 (digital pins 20 & 21) for interrupts associated with a rotary encoder. I’ve got this working previously with different pins - are interrupts on those two pins not available?
#define encPinAint 20 // PE2
#define encPinBint 21 // PE3
volatile boolean halfleft = false, halfright = false; // Used in both interrupt routines
void setup() {
// Set up rotary encoder w/ interrupts
pinMode(encPinAint, INPUT); // w/ 4.7k pullup resistor
pinMode(encPinBint, INPUT); // w/ 4.7k pullup resistor
attachInterrupt(digitalPinToInterrupt(encPinAint), isr0, FALLING); // Call isr0 when pin PE2 goes LOW
attachInterrupt(digitalPinToInterrupt(encPinBint), isr1, FALLING); // Call isr1 when pin PE3 goes LOW
}
void isr0() { // PE2 went LOW
if ( !motorRPMAdj ) {
return; // Don't care unless we're in mode to adj speed
}
delay(1); // Debounce time
if(digitalRead(encPinAint) == LOW){ // PE2 still LOW ?
if(digitalRead(encPinBint) == HIGH && halfright == false){ // -->
halfright = true; // One half click clockwise
}
if(digitalRead(encPinBint) == LOW && halfleft == true){ // <--
halfleft = false; // One whole click counter-clockwise
adjustWarpSpeed(-1);
}
}
}
void isr1() { // PE3 went LOW
if ( !motorRPMAdj ) {
return; // Don't care unless we're in mode to adj speed
}
delay(1); // Debounce time
if(digitalRead(encPinBint) == LOW){ // PE3 still LOW ?
if(digitalRead(encPinAint) == HIGH && halfleft == false){ // <--
halfleft = true; // One half click counter-
} // clockwise
if(digitalRead(encPinAint) == LOW && halfright == true){ // -->
halfright = false; // One whole click clockwise
adjustWarpSpeed(1);
}
}
}
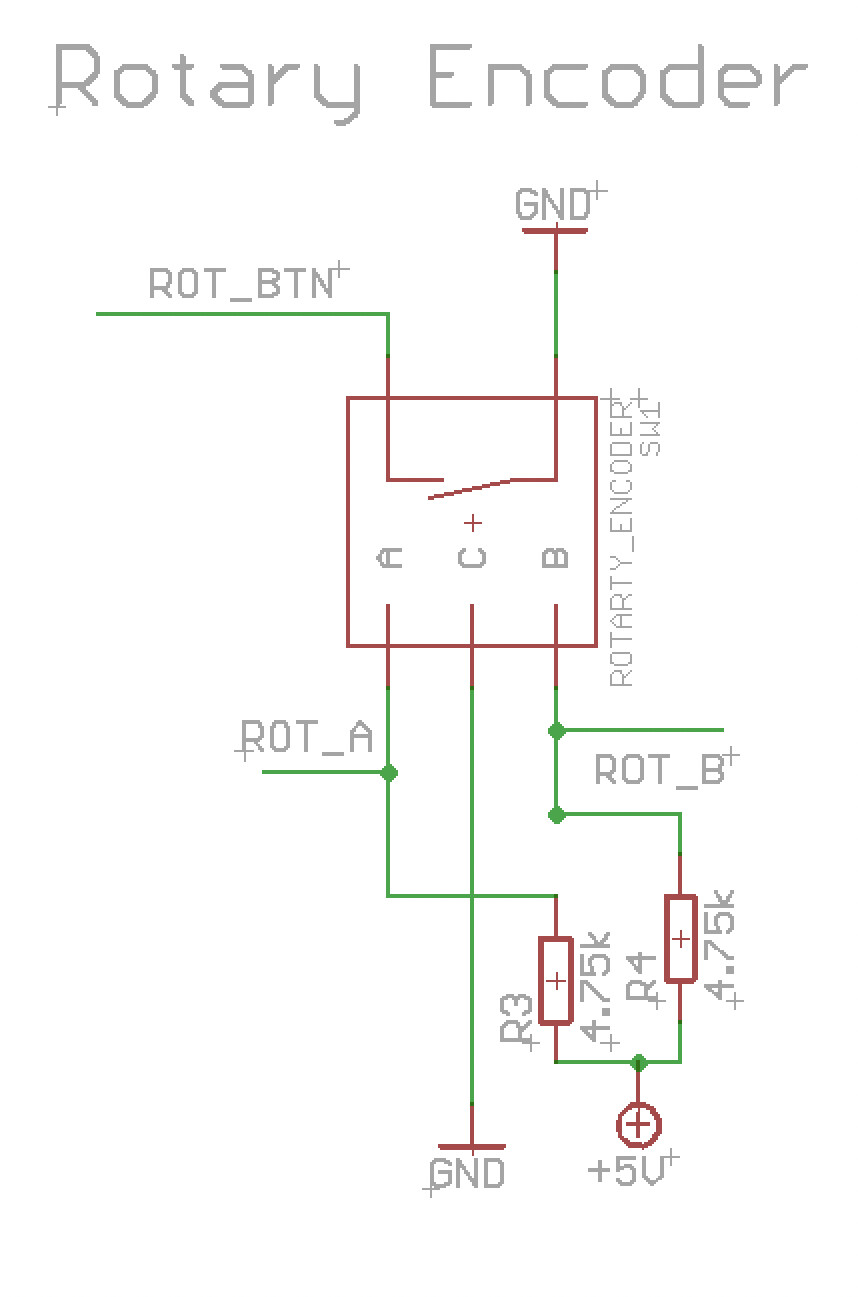
Rotary Encoder connections. I know this works with other boards on other pins, just not this one.