Now I’m developing a project, it’s robot controlled over the Internet. Already created software that allows you to control a robot using a webcam and a servo controller Pololu, the program works with USB GPS receiver and a joystick.
The documentation, unfortunately, is not yet available.To start need to install Microsot .Net Framework 4 and DirectX for Managed Code.
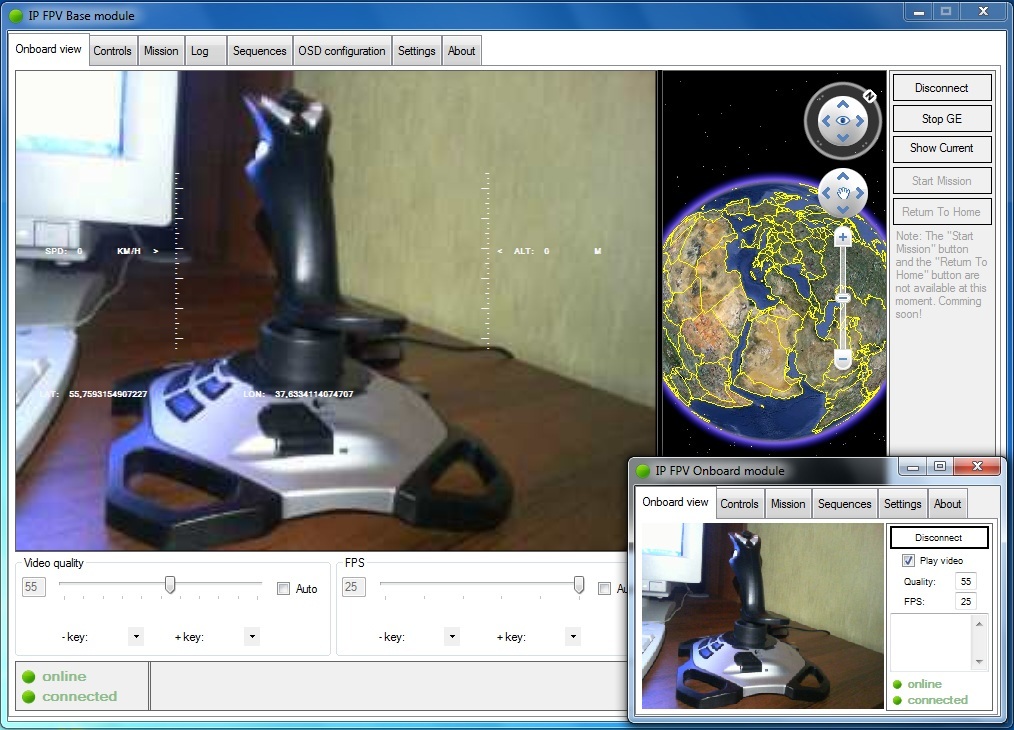
On the Settings tab of base module, you must specify the ip address of the onboard module, on the Settings tab of on-board module must be specified ip address of the base module. If you run both modules in same PC, try 127.0.0.1. Make sure that firewall does not block the application. Make sure the video device is selected in onboard module settings. And then click Connect on both modules. You can adjust the size of video packets (maximum packet size - 64K), and IN and OUT buffers size. If video frames does not display completely, most likely need to increase video buffer size. This is free software. If you have any questions, I will be glad to answer.
My experiments: