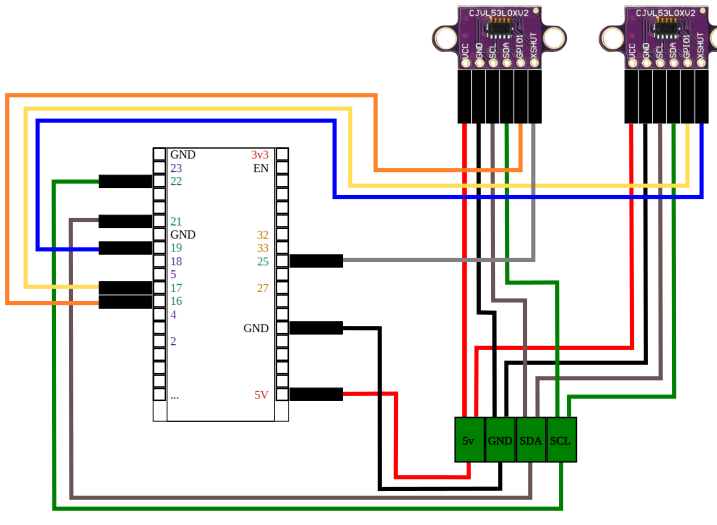
I have two Vl53l0x sensors separated by a distance of (say) 60mm, both connected to an Esp32 wroom, to calculate the time an object takes to trigger first one, then the other sensor.
The sensors are programmed to work in either direction and this works ok. However, i have noticed that the time taken in one direction is usually several 10s or even 100s of milliseconds less than in the other direction.
I swapped the sensors over and this made no difference to the times. However, when i swapped the gpios, the time difference swaps too.
So, does this mean that there is a performance issue with the Esp32 pins (i have read but didn’t understand about fast and slow pins) or is this something to do with the configuration cof the sensors?
Your connections look okay from what I can tell. You might try moving the GPIO1 connections to other pins just in case some of the pins on the ESP32 are limited in ways that others are not, but we are not familiar enough with the ESP32 to offer specific guidance.
It is typically beyond the scope of our technical support to offer assistance with user code (especially in cases like this where it seems look like you are not using any of our products), but I took a quick look and did not see any immediate explanation for the asymmetrical behavior you described. You could try printing timestamps or time differences at various points to try to identify where a lot of time is being spent, but keep in mind that the amount of time these time-of-flight sensors take to complete measurements (typically around 33 ms for the VL53L0X) can make them difficult or impractical to use in precise timing gate type applications (which you seemed to be describing in your first post). You might have more success if you use some of the ST VL53L0X API’s more advanced interrupt threshold settings, but unfortunately, it is not easy to access those settings using our Arduino library.