
my servo motor model is “i00600” iam trying to contorl this servo using arduino uno , but there is something wrong the it works only from “400” to “2330” microseconds , Is that normal ? ,also the data sheet said that it can reache angle up to 270 degree but the maximum angle that i got is almost 220 or 230 degree , i dont know where is the error or what could i do, any help, please .
The pulse widths that the Torxis will respond to depends on how you have set the scaling options on the jrk. As mentioned in the Torxis Servo Instructions and Cautions (found in the “Resources” tab of the Torxis servo’s product page), the servos are mechanically capable of 270 degrees, but by default are limited by software. Please note that it is possible to incorrectly configure the jrk and accidentally drive the Torxis servo beyond its physical end stops and damage it. You might consider contacting GearWurx, the manufacturer of the servo, directly (also recommended in that document) to see if they have recommended values for safely increasing the range of motion.
Brandon
Thanks for advising, now i set the motor to get 270 degree but there is a shift between the angle and the target can u explain me why, and how to solve it , here is some photo.
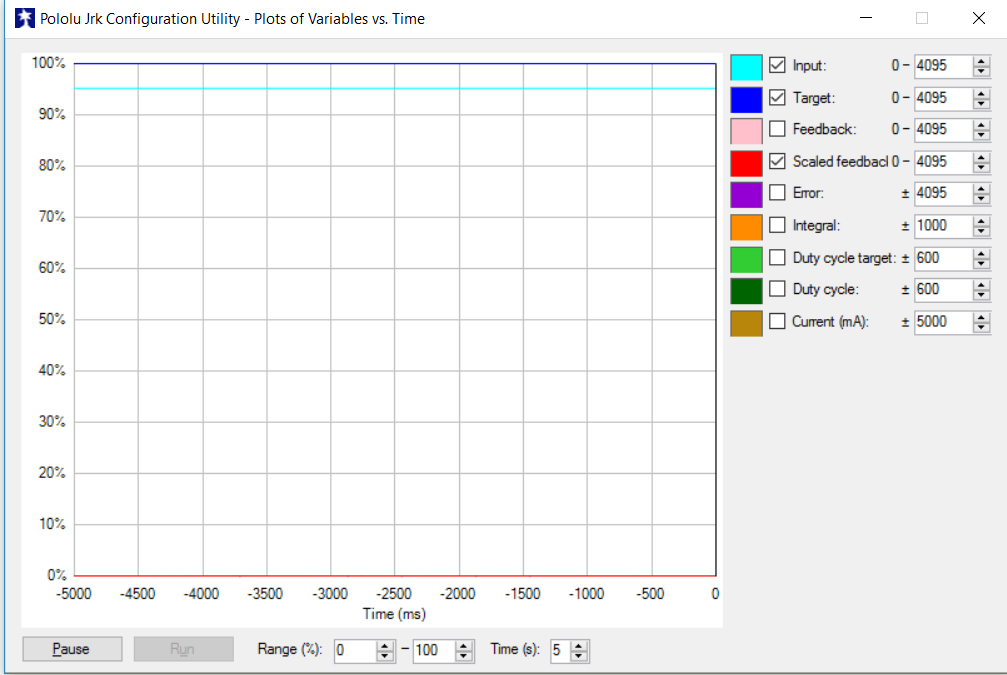
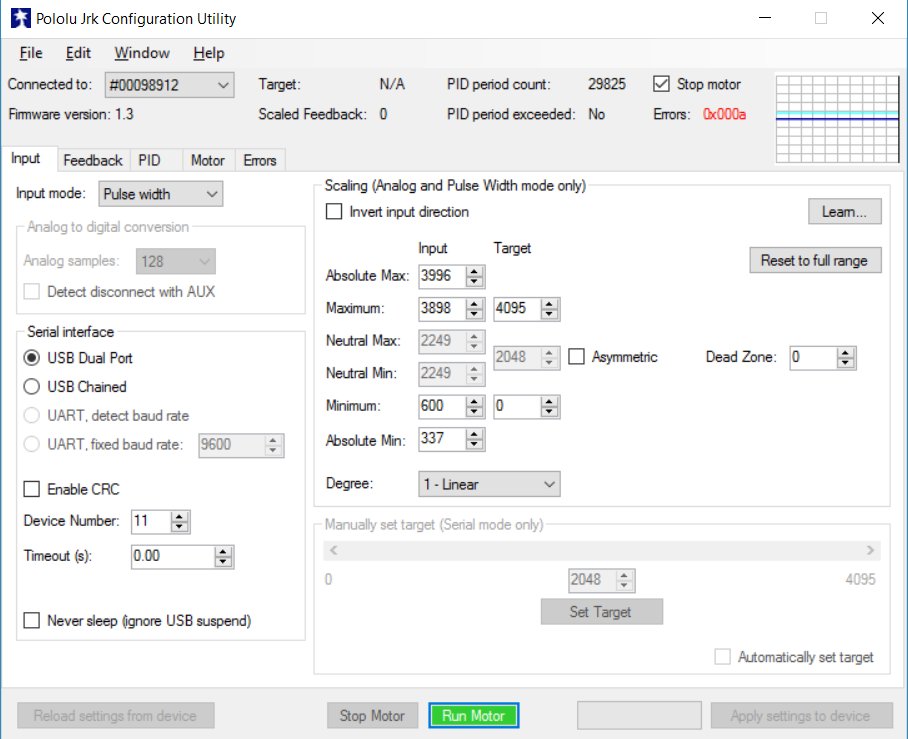
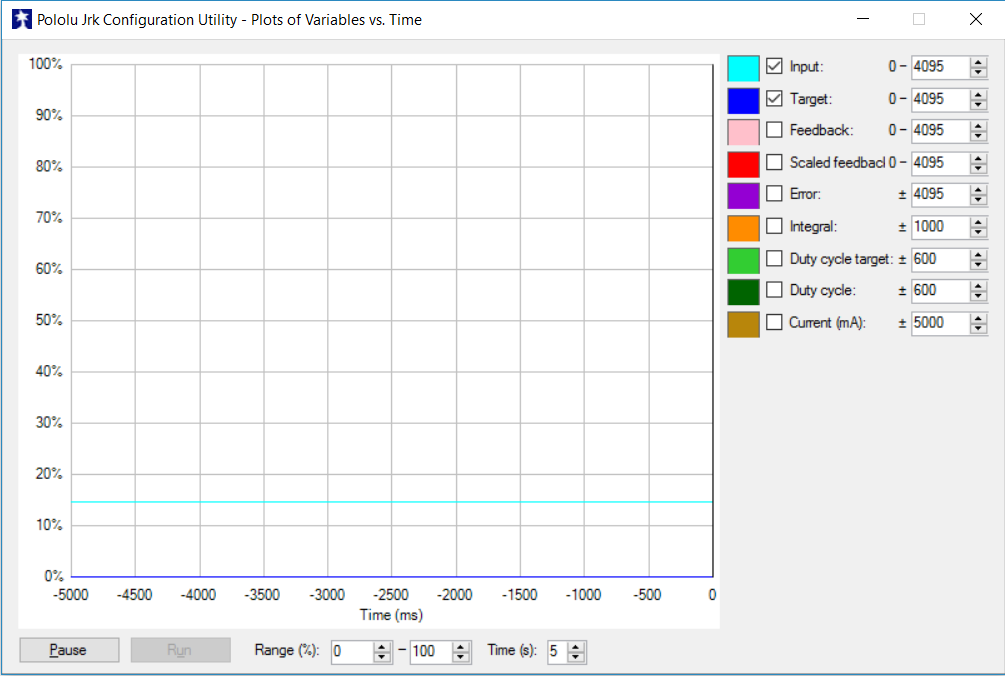
It sounds like you might be referring to the difference in the Input and Target values being plotted. The Input value is coming from your pulse width input, and the Target value is being derived from the input, depending on how you configured your input scaling options. For example, with the input scaling values shown in your screen capture, when your Input is reading 600, the Target should be 0, so your plot seems to match your configured settings.
Brandon