
I have developed a line following robot using your QTRX-MD-13RC sensor. It perfectly follows the line (straight, curved and sharp turns). The competition arena contains line breaks and dead ends. At the dead ends, robot has to make a U turn whereas at line breaks, it has to move forward till it finds the line again. So how can robot distinguish line breaks from dead ends and continuously follow the line?
Thanks
Line following competitions that include line breaks and dead ends typically have some built-in way to distinguish between them (e.g. another marking on the board or specific pattern to identify). Does your course have anything like that? Could you post some pictures showing your course or examples of the dead ends and line breaks that you have to identify?
Brandon
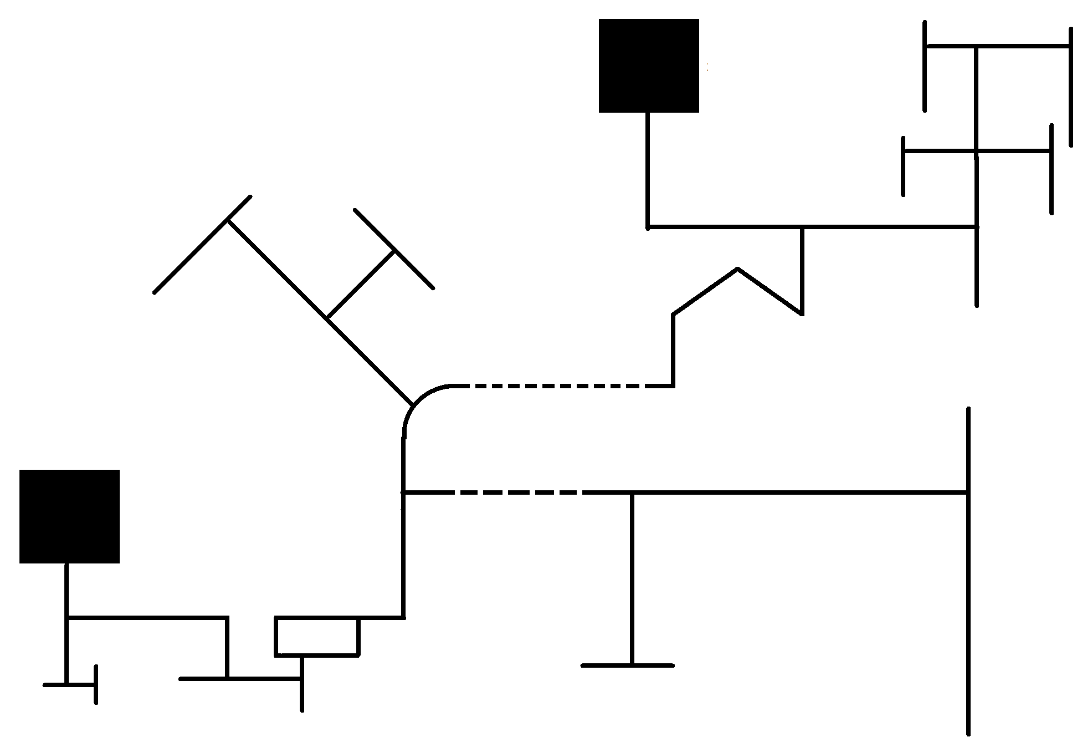
That’s a fun and challenging looking course!
It looks like the line breaks are fairly short dashes, so the way I would go about it is something like this:
First, detect that the line has stopped (which happens for either a line break or dead end). There are a variety of ways to do this, but what I have had success with in the past is keeping track of the previous line reading. Then, as soon as the line is lost, check the previous line reading and see if it was near the center of the line sensor. If so, the line has stopped abruptly and you can move on to determining if it is a line break or dead end.
One way to do that is to have the robot move forward for a short amount of time while continuing to take line sensor readings. If the line is detected again before the short time is up, it was a line break and the robot can go back to following the line again. Otherwise, it was a dead end and it should do a U-turn.
Brandon