Thanks, Natan.
True ideas. I use similar ones.
I have choosen Intel-PC (Raspberry appeared when i did many PC programs).
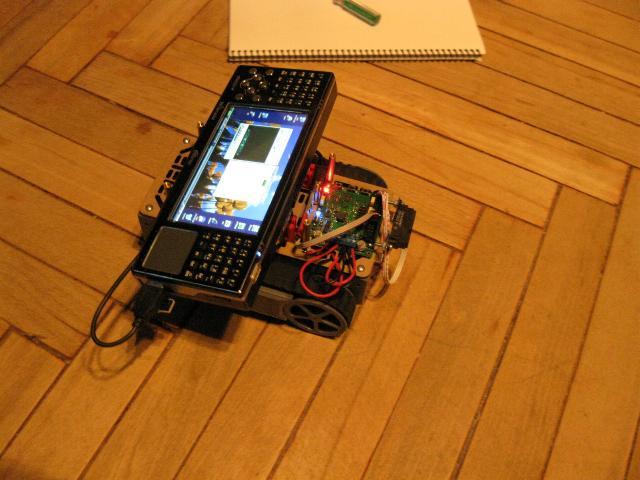
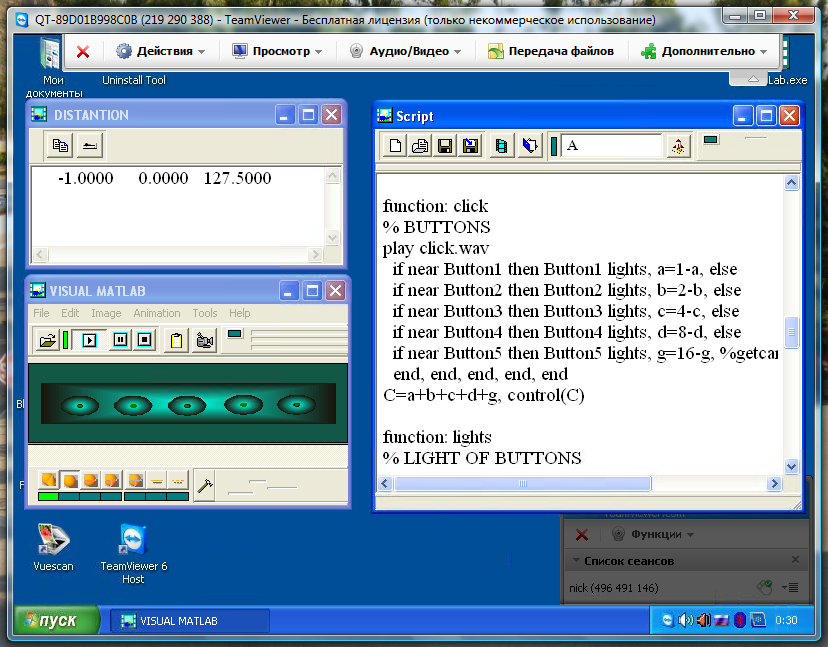
TeamView help me to control Intel-PC by Internet. Screenshot of computer of robot
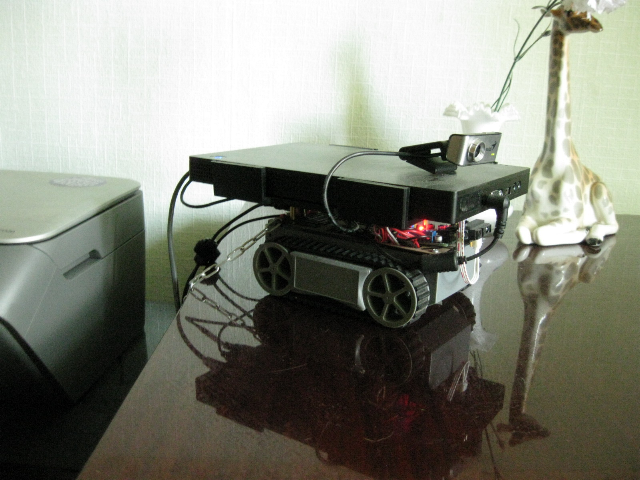
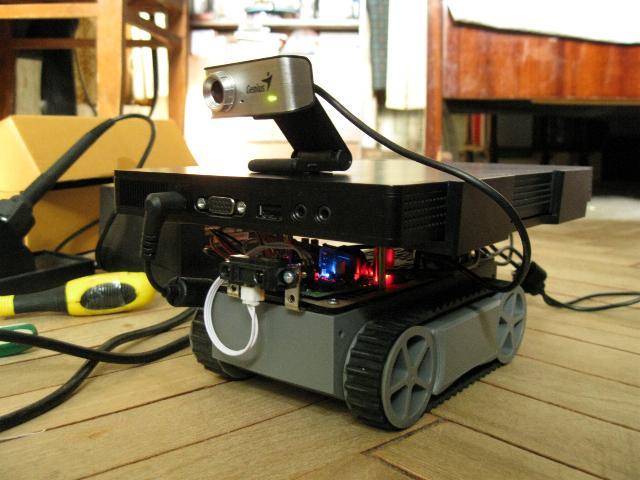
attached. Intel-PC platform looks today as not very expencive and small in size too.
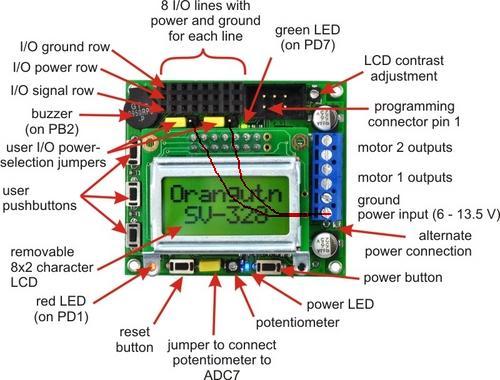
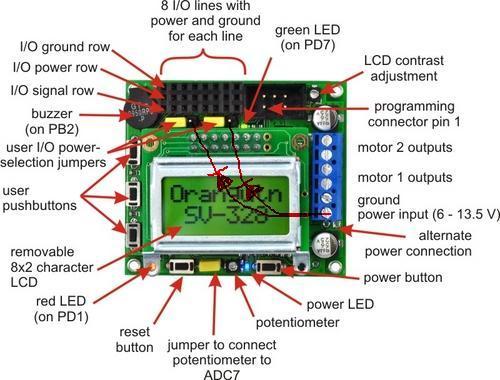
Intel-PC has USB port, so i can send command to Orangutan 328.
Orangutan controls 2 motors of robot. Besides, it send to Intel-PC sensor information.
My PC program (Visual MatLab, matrix language interpretator, i did else before 2000)
has possibility to read commans from my Server, that has interface of user. Such way we
can move P2P camera, placed on robot, in any direction, by Internet.
I prepared all of it, but i bought P2P camera a few days ago.
So my experiments were not very intensive before, i seen only photos before, sended from
robot webcamera. Today i see videostrim, so robot becoming be more interesting.
Nathan, big thanks U, u helped me understang, how to use Orangutan 328 long time, month
or two without swith off. If electric light will be disconnect - then again light on, Intel-PC by BIOS
will activate again, and Orangutan will use diodes thesame aim.
Mokrocontroller u send me link, i will look too. Intel-PC can be more expensive,
but safe my powers, becouse i know PC-programming well, and i need only 1 robot. So it is
good way too. Besides, i use Maestro, good thing too, together with ZigBee chips ETRX3,
to take command for servos of other robot. Wireless controlled.
My interest is rolled around robots of tele-presence in my country. To see it from City.
Priviet to u.
nathanb Pololu Employee
May 4
It sounds like you want to turn your Orangutan 328 on or signal your Orangutan over an Internet IP connection without connecting the robot directly to a computer. We do not have any specific suggestions for how you might do that, however you might be able to signal the Orangutan over TTL serial and control a remote switch with a WiFi microcontroller like the ESP8266 . Also, there are small inexpensive single board computers (with TTL serial interfaces) like the Raspberry Pi or C.H.I.P. that you might be interested in.
-Nathan
Visit Topic or reply to this email to respond.
In Reply To
nick2
May 3
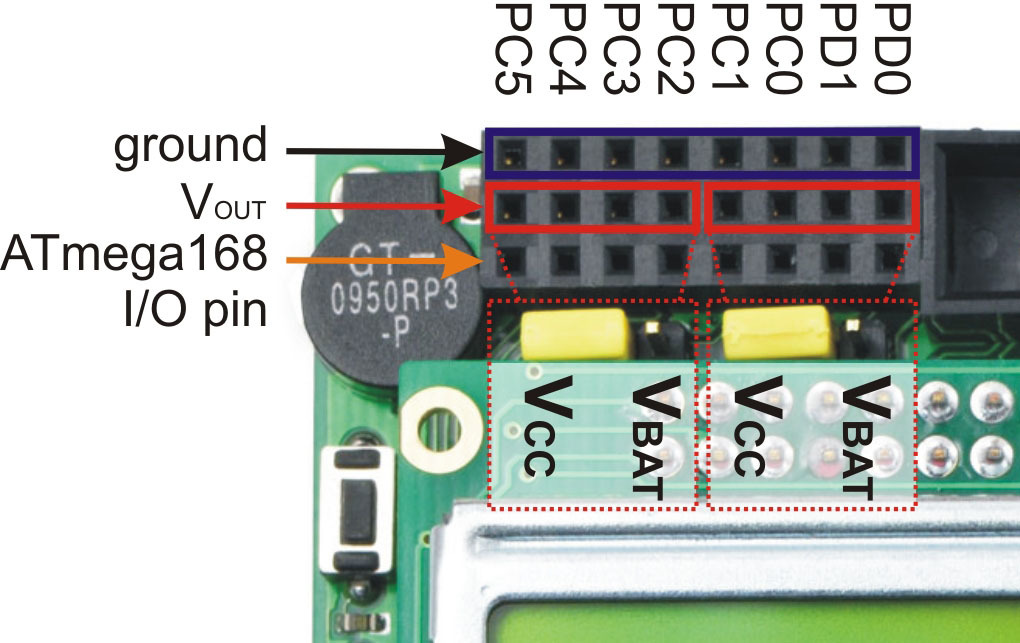
Thanks, Nathan. Very good scheme. No doubts more, diodes can be used to VBAT.
My question was born by P2P camera with 2 servos to observe around. If to take Intel flash looking computer, i will have Internet connection by Wi Fi, (or any old little computer) and by Orangutan 328 i can add 3 mot…