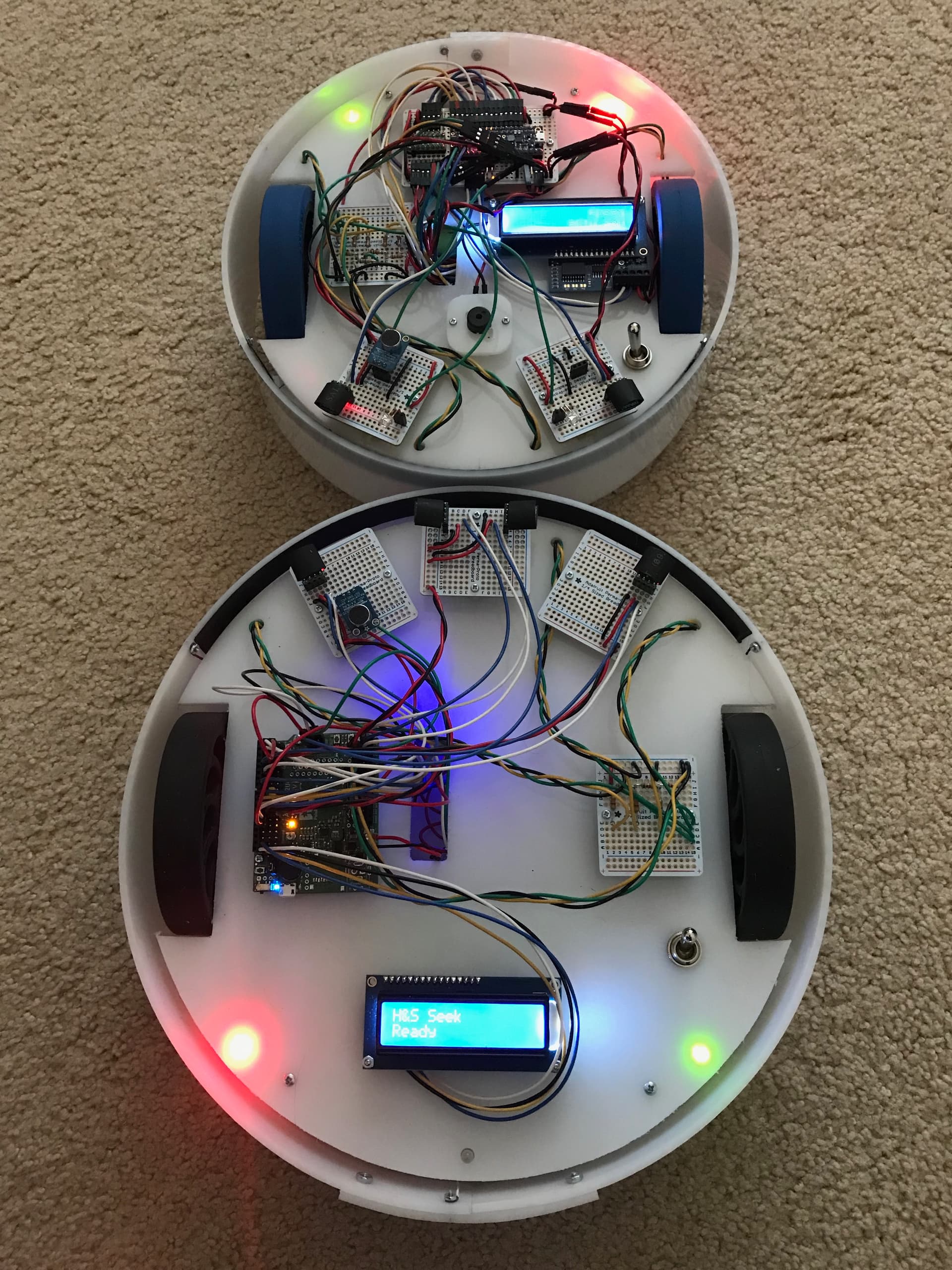
I wanted to share my Hide and Seek robots with the forum.
I’m using Pololu motors, motor drivers, A* boards and IR proximity sensors. The bumpers are using contact switches and a voltage divider. A ‘snap’ switch gets the game started via the microphones. They both spin a 180 and the Hider takes off at high speed while the Seeker counts out 30 beeps on the piezo buzzer. After 30 seconds the Hider stops, does another 180 spin, and starts pulsing its proximity sensors at a rate of 500usec. The Seeker then searches for the Hider using its proximity sensors to home in on the Hider’s signal. When the Seeker eventually bumps into the Hider, the Hider will spin to face the point of contact and the Seeker will start counting pulses. If the count reaches a certain threshold the Seeker does a celebratory light show and the game is over…
It was a lot of fun to make them and a great learning experience.
Thanks Tom
3 Likes
Hello, Tom.
That sounds like a lot of fun! Thanks for sharing!
It might be cool to be able to see a video of your robots in action. The forum does not allow users to post very large videos, but it does work well with videos linked from other sites (like YouTube or Vimeo).
- Patrick
Hi Patrick,
I took a short video and uploaded it to YouTube. I got lucky with this one because the Seeker didn’t wander off into another room…
Tom
2 Likes
Very cool, Tom!
Is the seeker scanning for signals when it’s rotating at 0:42?
What do your pets think of these bots?
Sam
Hi Sam,
You have a good eye!
Yep, that’s a slow spin trying to pick up pulses from the hider. I’m a big fan of behavior based robot programming and I lifted a combined behavior from this paper https://www.aaai.org/Papers/Symposia/Fall/1993/FS-93-03/FS93-03-008.pdf and added the spin to their random sweep and wall following behavior. To tell you the truth the spin hasn’t been very effective. The hider needs more IR emitters…
My dachshund pretty much heads for higher ground when the robots come out.
Tom
I uploaded another hide and seek video. This one shows the range of the IR sensors to be around 4 feet when the robots are facing each other.
Tom
2 Likes
Very nice project – and thanks very much for the reference article.
Looks very interesting. How did you make the chassis?
I posted my progress on another forum. There are some photos of the chassis and some code bits in there as well.
https://forum.dronebotworkshop.com/user-robot-projects/hide-and-seek-robots-request-for-comments/
Wow!! Tom, I really love your hide and seek robot. I think I’ll try doing a project like this soon.
Thank you for the kind words.
Good luck with your robot maze navigation project!
Tom