it will walks by two modes : 1) Tripode mode like conventional hexapod 2) wheel mode like a car
the issue is, that i have no idea how to block wheels or shaft of motor attached to the wheels.
i have seen some similar projects uses continuos rotation servos, but i have one question do they lock on 0 speed ?
because i need wheels to be locked while hexapod is walking in tripode mode.
I noticed you had a second post that seemed related, so I merged them. The continuous rotation servos do not do anything to actively stop the motors at 0 speed, but the gear train and motors inside themselves provide some resistance to motion.
is this resitance to motion quantifiable? on datasheets, is that the stall torque?
I have seen other related projects and they used continous rotation servos.
No, the stall torque is the torque at which the servo output will stop moving when it is being commanded to move. Moving an unpowered motor (like the one in a servo) is generally referred to as backdriving. We do not have the torque required to backdrive any of those servos well characterized, and that is not specified by the manufacturers. In case it helps, I just measured one of the FEETECH FS90R servos and it varied between about 4 oz-in and 12 oz-in (I took several measurements; that is the full range of values I saw).
Hi, for not starting another thread i will post my question here, since is related to it.
I have experienced with continous rotation motors from american robotic supply, and i had some issues, with servos starting to rotate by itself i think is due the analog pot and all that.!
my question is how stables are polulu continuos rotation servos ? if i sent pwm signal to stop they will stop with no way to activate itself due noise or something ?
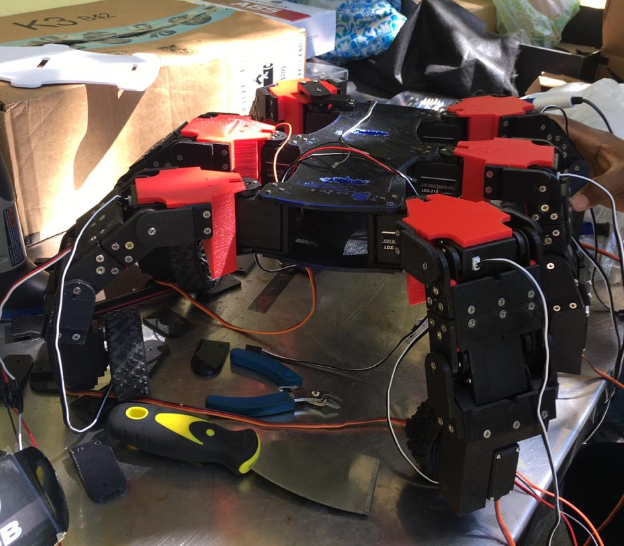
Which one would you recommended? i have advance a lot with the project, i attached a pic. But right now i need to solve the issues of servos wheel activating by theirself., since when robot is walking in tripode mode, wheels must not rotate.
What size servo do you plan on using? We have a few standard size continuous rotation servos that specify a ± 5us zone for stopped position and have a potentiometer for adjusting the center of that some (which is around 1500us). Noise that causes the signal to stray outside that dead zone would still cause the servo to move. You might use an oscilloscope to look at the signals your controller is sending to see if they are consistent enough to work. Also, how are you powering the servos in your system and how many servos are there? If the voltage on your power supply drops, that could cause servos to make random movements.