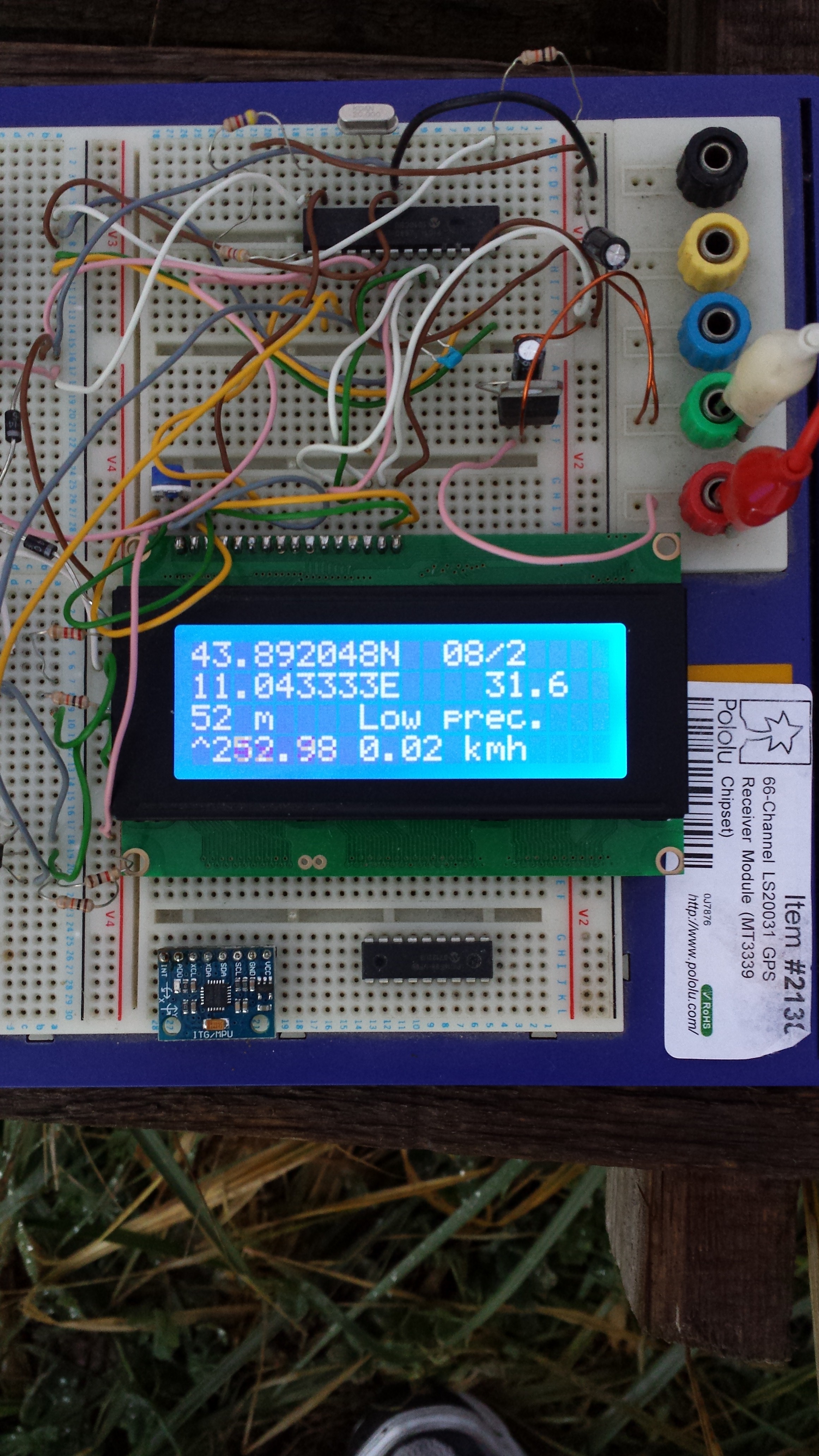
I have hooked up correctly the GPS module and it i’m able to communicate and set it up correctly. The position, speed and altitude seems ok but the HDOP has very high values, even in open sky with 8 satellites locked. Values up to 30 are quite common but they don’t seem to be accurate ad all, (i don’t have 90 meters of error on my measurements, they appear to be less than half meter). Does HDOP unit are different from the ones specified here? en.wikipedia.org/wiki/Dilution_o … _%28GPS%29
maybe 30 means 3.0 ?
I need to know this because I want to flag the GPS status to show the IMU how much to rely on the GPS to reduce the probability of catastrophic flyaways in my UAV
SYMBOL GPS_STATUS_NONE = 0
SYMBOL GPS_STATUS_NOT_FIXED = 1
SYMBOL GPS_STATUS_FIXED_HP = 2 'low HDOP < 4 and sats => 6, high precision
SYMBOL GPS_STATUS_FIXED_LP = 3 'high LDOP > 4 and sats < 6 , low precision
SYMBOL GPS_STATUS_ERROR = 4 'error