I am doing something similar with servo and ESC/brushless motor control with the Maestro.
I am having trouble, however with getting the brushless motor to run. I think there may be something fundamental about controlling the ESC with the Maestro and Pololu software that I am missing.
Currently I have two servos, and an ESC hooked up to the Maestro. I can control both servos fine, however I cannot get the motor to do anything. When I hook up the ESC to a regular RC receiver and transmit a throttle signal, the motor runs fine.
Is there something different about the settings for a ESC channel compared to a servo channel? I have always thought the signals were the same.
Additionally, how does motor RPM as a percentage relate to “servo position” as displayed in the software?
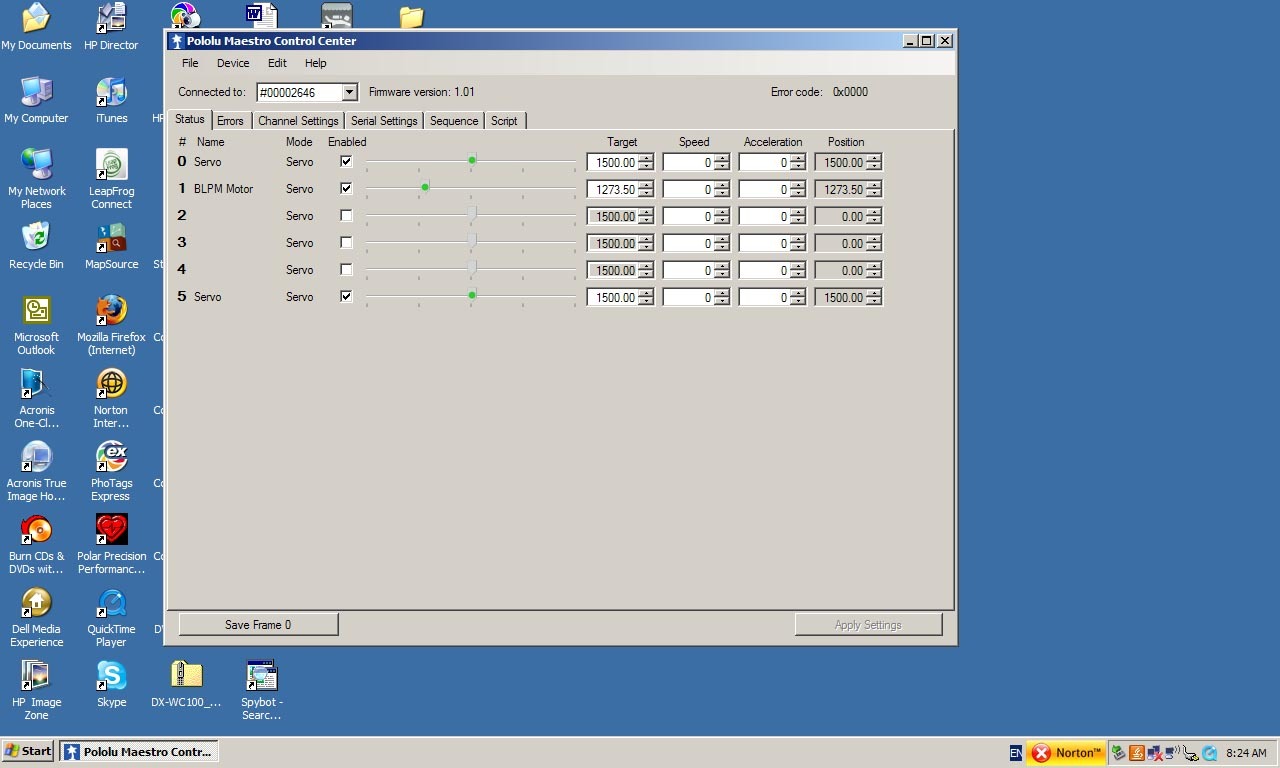
Here is a screenshot of what I have. Servos are on channels 0 and 5, BLPM motor and ESC is on 1.
Hello Matt,
I have split your post off into a new topic, since it was not related to RoboRealm.
Anyway, if your servos are running fine, you have probably configured your Maestro correctly, and it is just a matter of what position values you are sending.
There are a couple of possible differences between an ESC and a servo, and a more fair test would be to hook the ESC up to a servo channel of your receiver (instead of the throttle channel) to see how it behaves. The ESC might have a safety mechanism preventing it from powering the motor if it is not started close to 0% power. The manual for your ESC should describe this safety mechanism as well as the pulse settings corresponding to 0% and 100%. For example, 0%/100% might correspond to 1000/2000 us, so if you start it up around 1500 us, the ESC would go into safety shutdown mode. It is also possible that the range of valid pulses for your ESC is 1500-2000 us, so if you only tried sending the value shown in your screenshot, it would not move anyway.
If you can’t find the manual, you can try starting it around 1500 and moving UP, then, if that doesn’t work, reset everything and try starting it at 1000 us and moving up from there.
I am having a similar problem, and I don’t have a manual for my ESC.
I have one immediate concern. The ESC is connected to a 7.2V NiMH battery, while the Maestro has a 5V lithium battery on the servo power bus. Is the ESC going to send 7.2V back to the Maestro, thus making a “7.2 minus 5” short circuit?
When I connect the ESC power I hear buzzing. When I connect the Maestro power and enable the servo output to the ESC, I hear a clicking buzz, as if the ESC was doing something in response to the PWM. I shall test it with a regular RF receiver this weekend.
Hello,
Some ESC’s have a “Battery Eliminator Circuit” (BEC), which can power the servo controller with a regulated voltage, maybe 5 or 6V. You can easily check with a multimeter whether there is a voltage on the power line of your ESC when the Maestro is not connected. If you measure a voltage, even if it is 5V, don’t connect it to your lithium battery, or you will have a short circuit. You can do this, for example, by cutting the middle wire of the servo cable going to the ESC, cutting the middle header pin on the Maestro, or making a custom cable.
Please let us know what you find out about your ESC!