Name is Mike and I am a first time poster. I am planning on building a two wheel balancing robot and would like some feedback on my parts list:
Baby Orangutan B-328 Robot Controller
100:1 Micro Metal Gearmotor HP
Pololu 42x19mm Wheel and Encoder Set
LPY510AL Dual-Axis (Pitch and Yaw or XZ) Gyro with ±100°/s and ±400°/s Ranges
MMA7260QT 3-Axis Accelerometer
Pololu Carrier with Sharp GP2Y0D810Z0F Digital Distance Sensor 10cm (wall avoidance)
Plus various connectors, wires, spacers, etc.
Mounting this on a Pololu 5" Robot Chassis RRC04A and may use spacers and a second rrc04a to make a deck.
Just doing this to have some fun fiddling with hardware and software. I have some hardware, software and firmware background and have build many projects over the years (too many in fact The goal is to get the bot to stand on two wheels and move around. At some point I may add remote control via an xbee or some other remote technology.
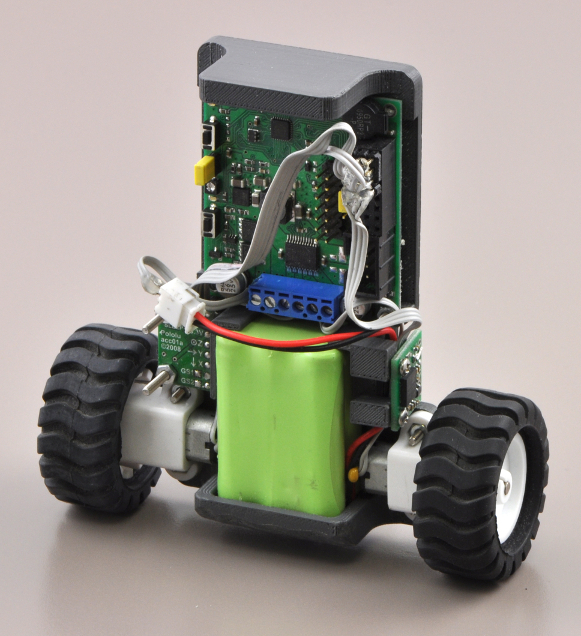
I’ve taken a look at your wishlist. I’ve built a balancing robot (image below) before using mostly Pololu parts. I have a couple of comments about your parts list:
Your choices for the accelerometer and gyro look fine.
Adding a second deck to your bot will probably help a lot. Keeping the weight up high increases the bot’s moment of inertia making it rotate more slowly about the wheels.
The HP motors you want to buy have a stall torque of 1.6A at 6 V, which is higher than the continuous 1 A that the Baby-O can deliver per-channel. This will probably be okay if you keep the bot’s weight down and are careful about your programming. If you are constantly switching from full speed in one direction to full speed in another direction it could put too much of a burden on the Baby-O’s motor driver. You might consider the Orangutan SVP, which has an on-board co-processor that handles encoders without using cycles from your main processor and motor drivers that can deliver 2A continuous. The SVP-1284 also has significantly more programming space (128KB) and RAM (16KB) than then Baby Orangutan.
Why are you only getting female-female jumper wires? Wouldn’t some male terminated (at least at one end) ones be nice for plugging into the breadboards you are getting?
It looks like you want to get some ball casters as a fall back plan. Good, the RRC4A is a nice base for a regular two-wheeled robot too!
Did not think about the fact that it would be in or near stall mode. Do you think the low power version of the 100:1 motor will be ok with the lower torque, 10oz-in vs 25oz-in? What motors did you use?
I see what looks like ceramic caps the motor terminal. Is it protect the controller or reduce noise?
Did you use the Orangutan SV-328 Robot Controller? If so, then how much of the 328’s flash did you use?
Did you use a 5 or 6 cell battery pack? I selected the 4 cell batter holder to use regular batteries to supply 6V. I will get rechargeable once I figure out what is best combination of cell count and cell size.
I am going to use the double-sided breakaway straight male header to make pins for the the bread board. The power pins on the power rail will be male, but I’ll take the risk for now. Wanted to keep the wire selection universal for now till I build up my parts inventory.
Nice looking robot, did it balance well? How about while in motion?
I used the 50:1 HP gearmotors with my balancing robot. If you are really set on using the baby-orangutan, I think you should still go with the HP motors. Just be aware that you want to avoid rapidly changing the motors from one direction to the other (this isn’t a common thing to do in balancing control).
The ceramic caps on the motor terminals reduce the noise generated by the motors. We have a document that talks about dealing with motor noise. I used one capacitor per motor.
The bot is using a Orangutan SV-168. It is using 25% of the program memory. Balancing algorithms don’t necessarily take up a lot of space, but they do usually use a lot of processor cycles.
It could usually stay balanced for about 10-20 seconds. My co-worker made one that was a little taller balanced really well. I’m not sure if the difference was because of the code, or the height difference. Mine didn’t do too well moving, but I didn’t pursue getting movement to work for too long.

 The goal is to get the bot to stand on two wheels and move around. At some point I may add remote control via an xbee or some other remote technology.
The goal is to get the bot to stand on two wheels and move around. At some point I may add remote control via an xbee or some other remote technology.