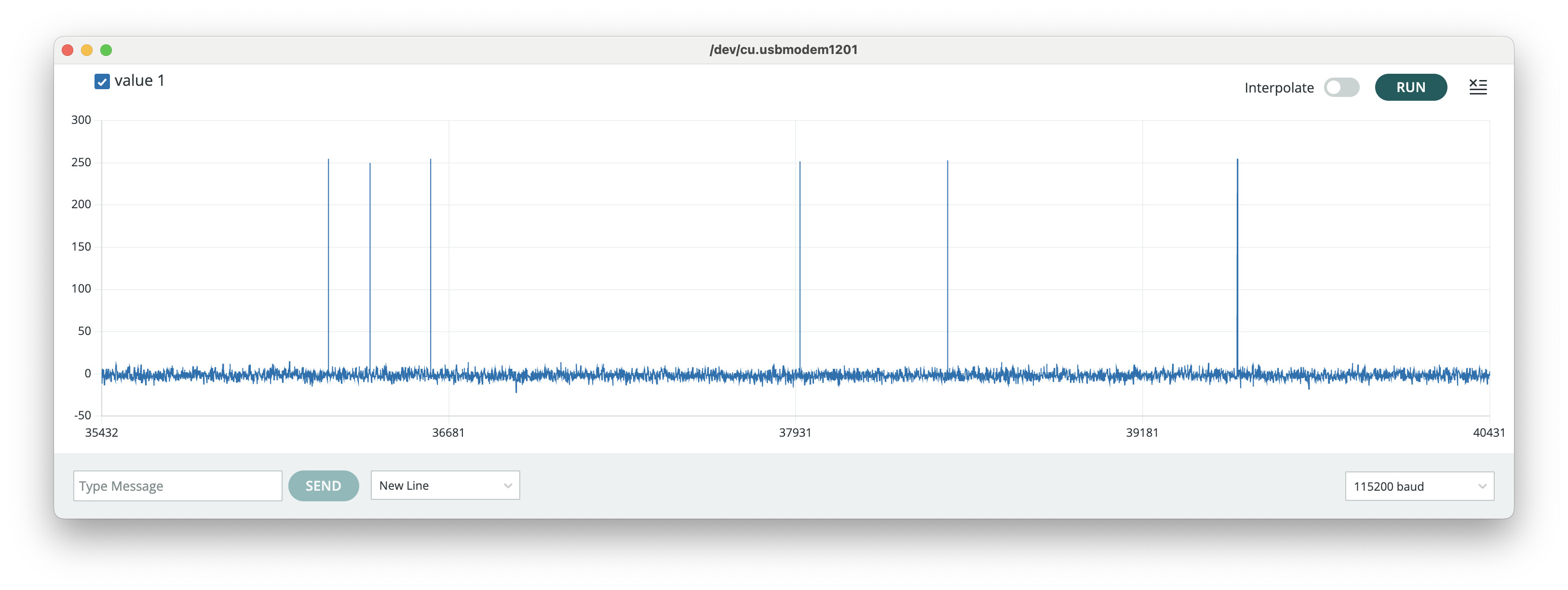
Hi, i am working with the gyroscope of the 3pi+ robot. Using the following code to read the raw gyroscope date for the z axis, I regularly get some wrong values. (The robot is stationary placed with out moving it.)
I’m glad that solved your issue, and we’ll change the library to include that setting.
By the way, I would also recommend calling imu.enableDefault(); before imu.configureForTurnSensing(); just to make sure everything else is set to reasonable defaults, but we’re looking into making the configureFor... functions call enableDefault automatically to make that unneeded in the future.