Hello,
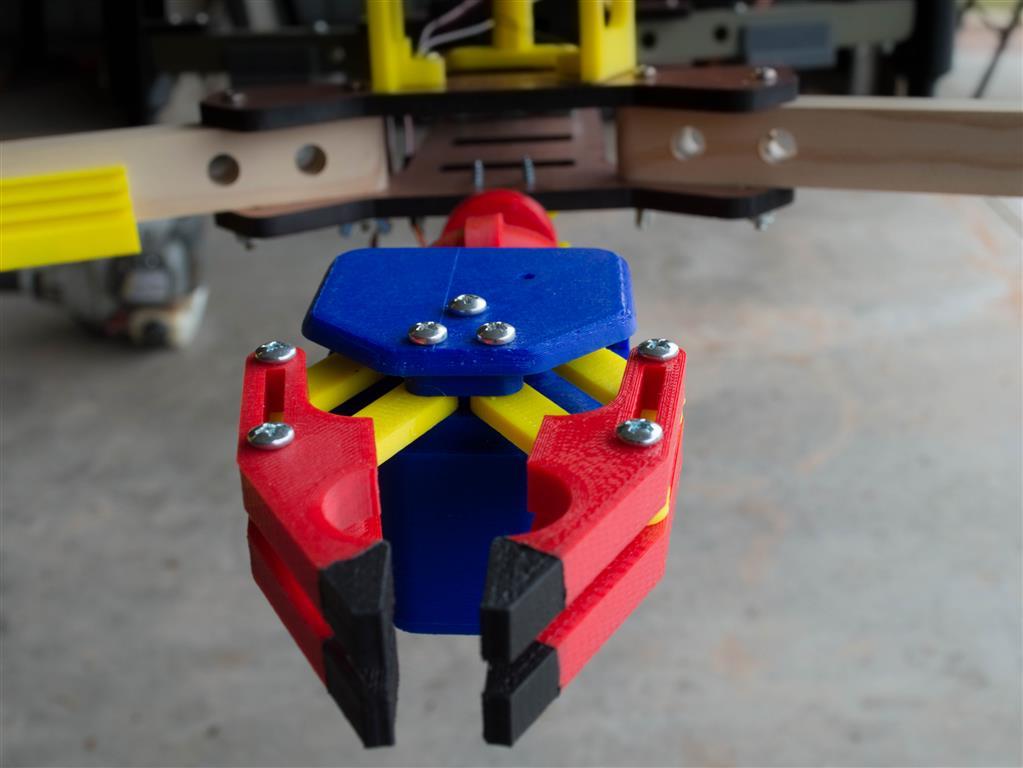
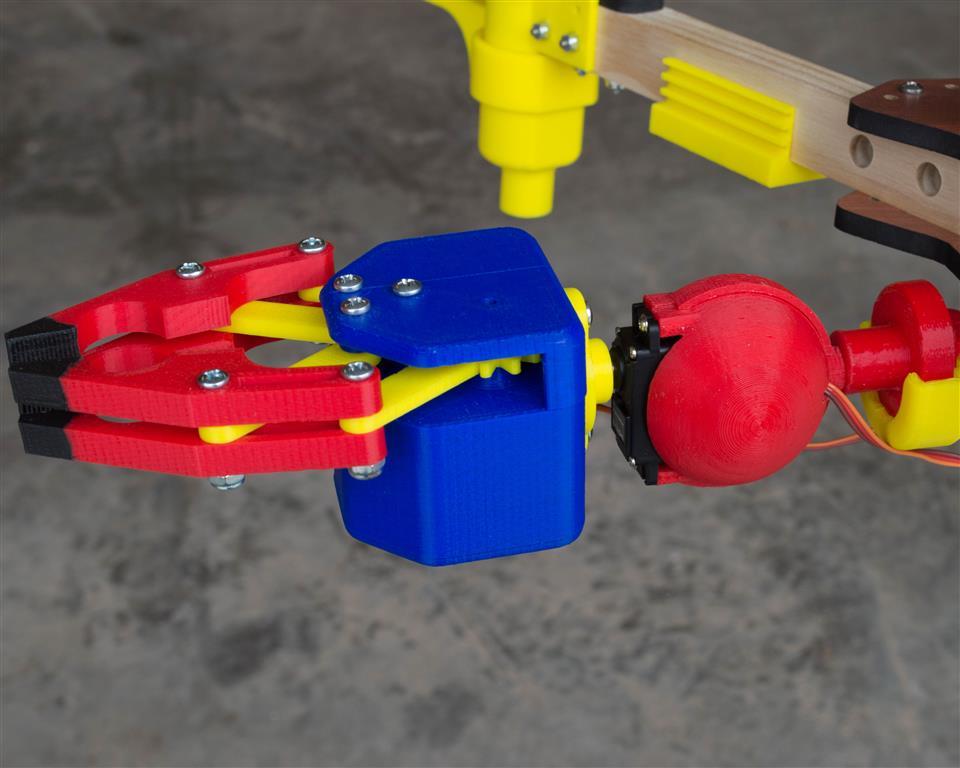
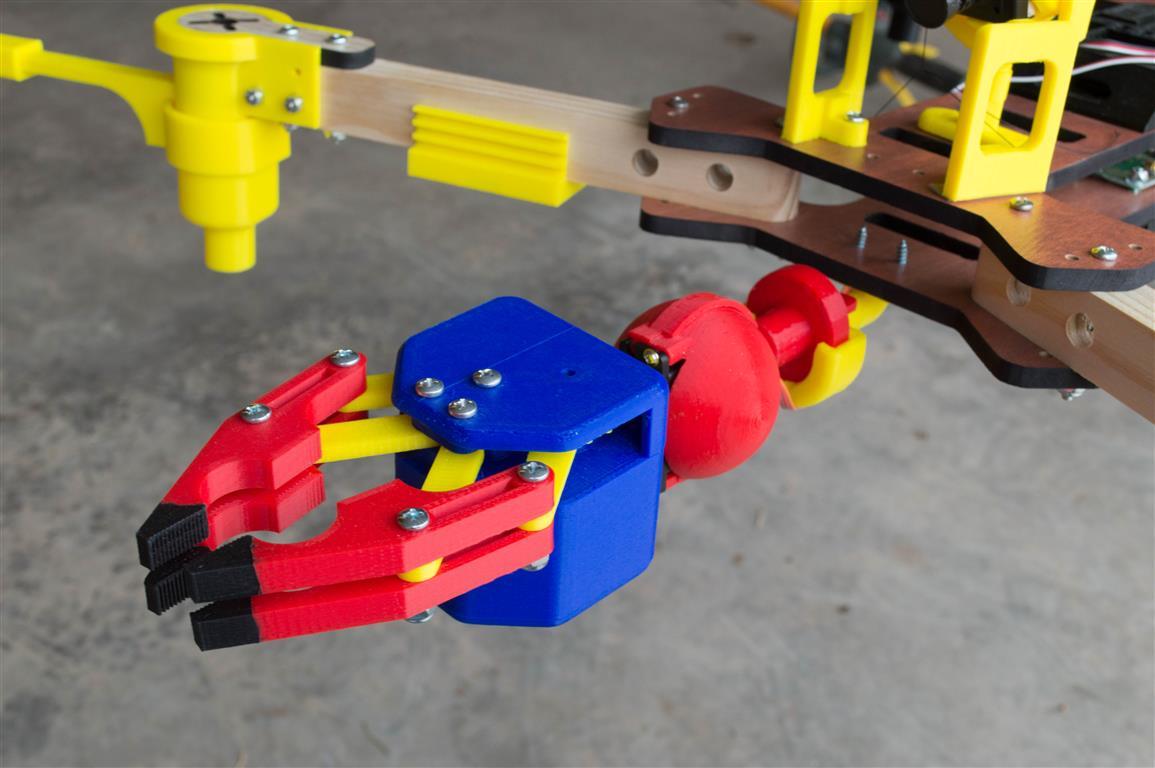
I am designing a construction drone for the construction industry. The claw for the drone has already been designed and works with servos on a manual tester. I would like to have the claw operate like a robot claw sensing pressure on the item it is closing around. I posted this on the arduino site and they directed me to the polou robotics pages controller. I watched the videos and this intrigues me how it works. So my question to this forum would be.
Can I control my claw using the micro controller (6 channels) with pressure sensitive pads added to the ends of the claw? I would like the claw to pivot, and grab.
Can I substitute the windows controller with the usb plug in on the polou for a controller using knobs instead of the window’s interface? Kind of like a controller on a robotic arm.
Can someone list the items I would need to design such a thing? I can print a box for the controller. After I do my testing with the claw, I will switch all of the functions over to the taranis open source radio receiver and program the radio switches to replace the manual controller.
It sounds like you are talking about the Micro Maestro servo controller. If so, the Maestro channels can be used as input if configured that way, but without knowing more specifics about what sensor you want to use, how you want the servos to respond, and how many servos, sensors, and inputs you want to connect, I cannot say if the Maestro controllers are appropriate for your application.
The Micro Maestro can use the input from something like a potentiometer to control a servo, but again without knowing how many servos you want to control and how many inputs you want to read I cannot say if the Micro Maestro is appropriate.
You might need an additional microcontroller to do some of the things you want. However, picking the parts for all the things you are asking is something you are going to have determine since it will depend on factors such as what you feel most comfortable using and how you want to implement what you are trying to do in your specific setup. If you can offer more specific details, I might be able to offer more advice or suggestions.
Hi thanks for answering.
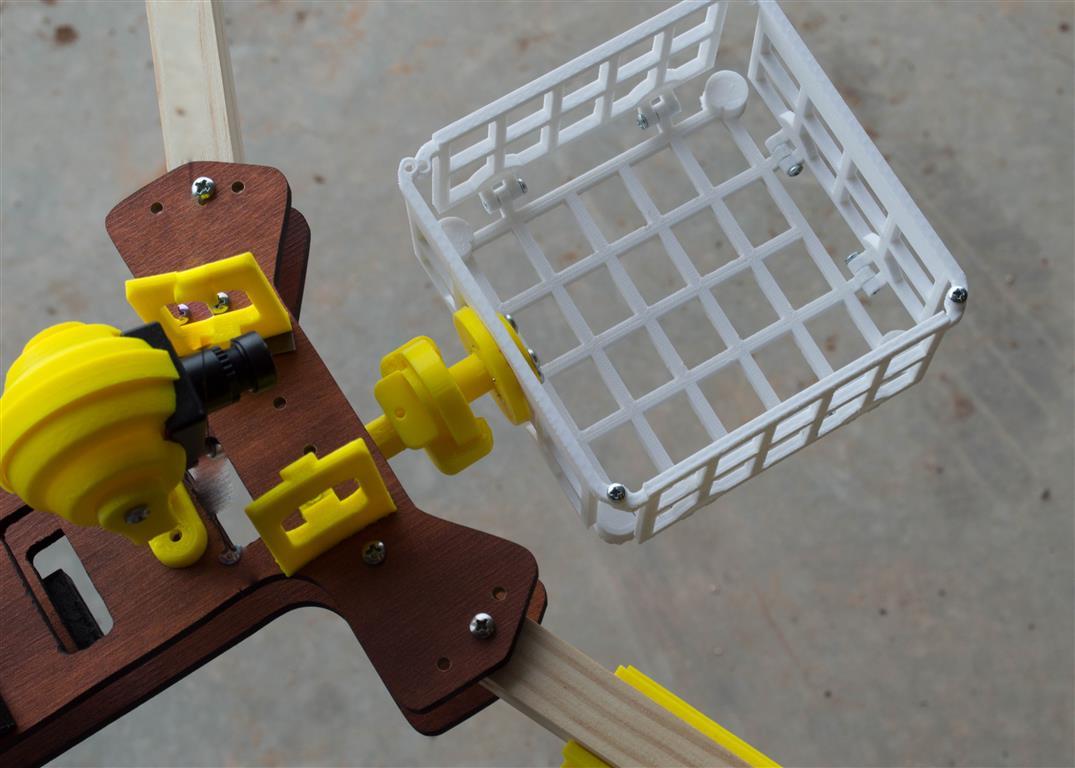
Just two servos. One to pivot and one to close on the object. The pressure plates would be figured out in the ends of the claws. Here would be a scenario. An object was dropped from a building and needed to be retrieved. Instead of climbing down stairs or taking an elevator or the object is in a hazardous place. The person takes his claw drone and descends down to pick it up. The object is light enough to be picked up with the claw and tall enough the claw can grab it. This is not a perfect everyday use of course but it is test. He will use the ball camera to zero in on it.
For testing without using the actual drone I would like to have a small control board I can print a case for. I am guessing the potentiometer s are knobs? That would make sense I guess. So to answer the question. Two servos, two pressure plates, and a small case for the control board. I will also use it for you tube videos to show it working. Thanks Grant. Can you help me put together a shopping list of things I would need.
Yes, rotary potentiometers can be used like a knob. You still did not say what the sensor output would be or exactly how the servos should respond to it., so I still cannot say if the Maestro is appropriate. I also cannot suggest specific parts based on what I know of your system, but if you put together your own list and have questions about our products, I would be happy to answer them.