Thanks your help Derrill,
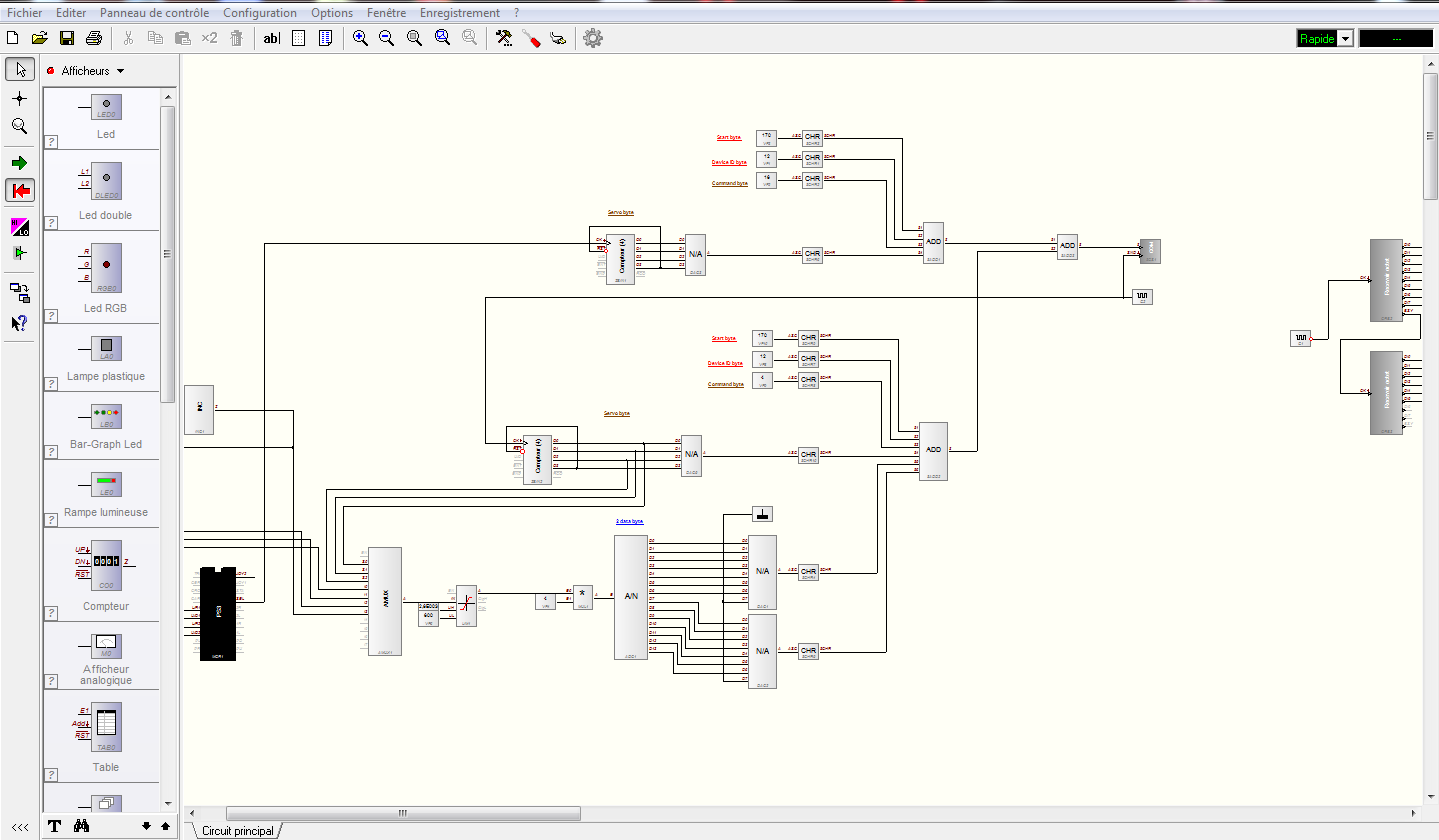
So in first I work both with maestro center an my program software (profilab expert ) .
With my program soft I emit the bytes command ,and see on maestro center if work good to can progress fine, but not realy use maestro center .
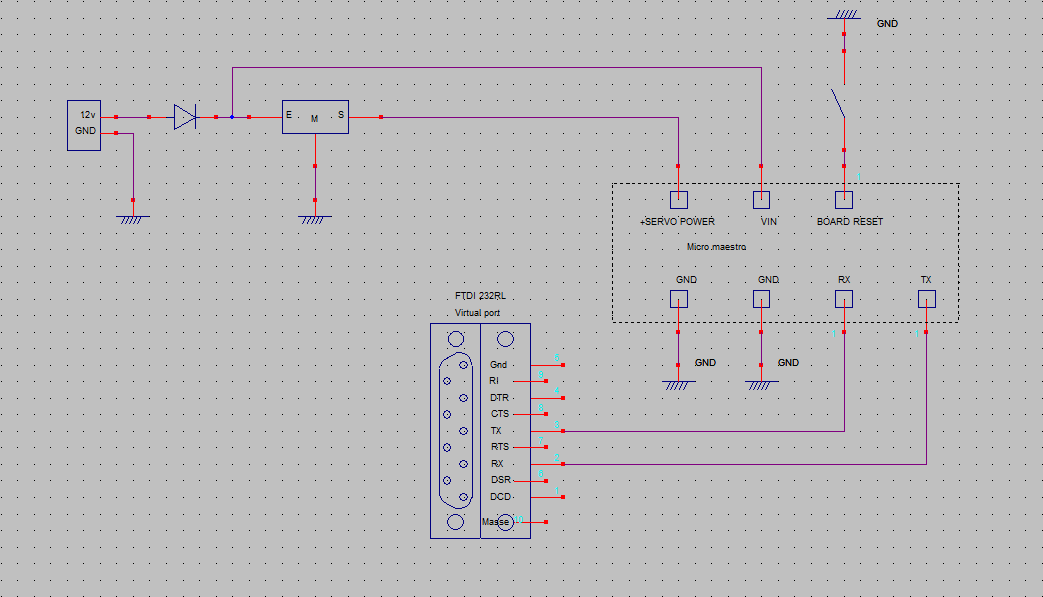
But all my command send trought my virtual port com were i connect the tx computer to rx micro mestro and rx computer to tx maestro ,and click on disconnect the device in maestro center.
In Profilab Expert (my graphic programer ) we can realize connection with com port and emmit all byte command .
Power will use ,just be a 12v dc regulated supply on Vin and 5v for servo .
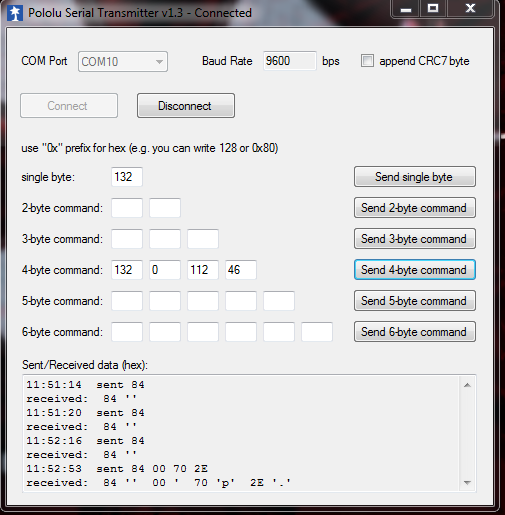
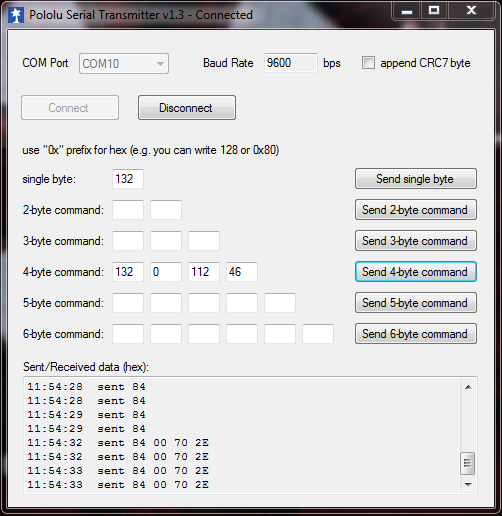
And use these serial command in polulu protocol like :
Start byte : 0xAA (170)
Device number : 0x0C (12)
Command byte : 0x04 (4)
Channel number : 0x00 (my first servo)
first target low byte
last target hight byte
I want precised all work finily ,with this protocol on my virtual com port , and never use or want to use the usb port.
but in uart detect baud rate configuration ,device deconected in maestro center my virtual com port connect on micro maestro tx and rx signal ,I see with my oscilloscope usb communication throught device an computer .
One thing forget say ,when sending byte in uart mode receive same serial echo (like 0xAA send > 0xAA receive etc… )
So this is thing don’t understand ,in serial configuration normally I must not have active usb signal ?
I want control my rov trought underwater ,with a serial signal (RS232 or 485 ) from my computer to my Rov at about 300 ft tether long ,and can’t use a USB communication .
I can send here this little profilab expert program but must modify it cause i use it wit ha PS3 joystik ,and you can test it like a little windows application ,and see it .
Sorry Derrill ,I try explain my problem ,more could I ,If necessary I can send anything to explain it ,but I need to resolve it …