Goodnight!!
I have a problem with the programming for my white line follower in black background, the problem is in my code since it is not giving me results and I ask for your support to help me out of this hurry, then I show you the code and the Follower data to help me please, I would greatly appreciate it.
Previously I was using qtr8a sensors and the line follower worked, the problem was when I damaged my analog sensors and unfortunately I did not find the same ones and replace them with qtr8rc (digital) and I thought the programming would be simple to change, but for I have become a mess since the follower does not work.
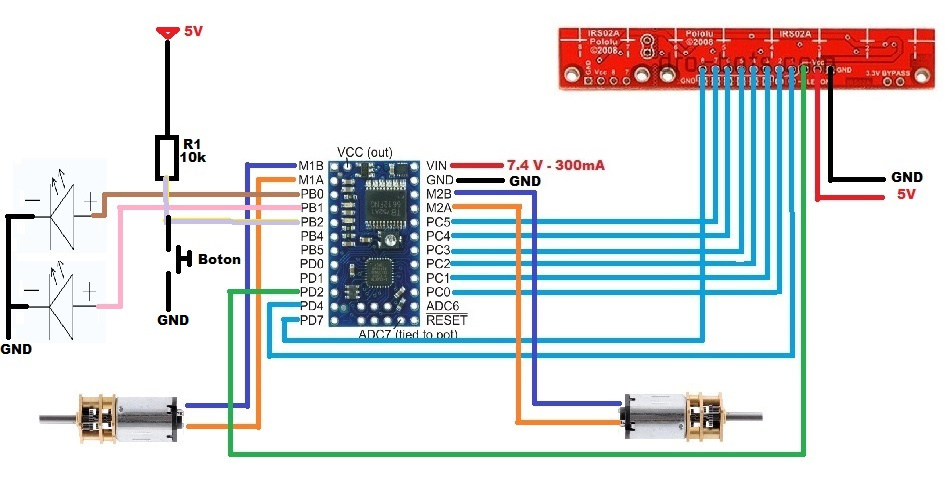
Microcontroller: Baby Orangutan 328p
Motors: Pololu 10: 1
Sensors: QTR-8RC
Code:
#include <OrangutanDigital.h>
#include <QTRSensors.h>
#include <OrangutanMotors.h>
//------------------------------------------------------------------------------------//
//Sensores de Linea PD
#define NUM_SENSORS 6 // Numero de sensores que usa
#define NUM_SAMPLES_PER_SENSOR 5 // Muestras por sensor
#define EMITTER_PIN 2 // emitter is controlled by digital pin 2
// sensors 0 through 5 are connected to analog inputs 0 through 5, respectively
QTRSensorsRC qtrrc((unsigned char[]) {14, 15, 16, 17, 18, 19},
NUM_SENSORS, NUM_SAMPLES_PER_SENSOR, EMITTER_PIN);
unsigned int sensorValues[NUM_SENSORS];
OrangutanMotors motors;
//--------------------------------------------------------------------------------------//
//Velocidad Maxima Robot//--------------------------//----------------------------------//
const int maximum = 80;
//--------------------------------------------------------------------------------------//
//VALORES PD//----------//VALORES PD//--------------------------------------------------//
int VProporcional = 1.45;
int VDerivativo = 16;
//--------------------------------------------------------------------------------------//
//Velocidad de Calibracion
int velcalibrate = 20;
//--------------------------------------------------------------------------------------//
void setup()
{
int inPin = 10;
int val = 0;
pinMode(9, OUTPUT);
pinMode(8, OUTPUT);
pinMode(inPin,INPUT);
val = digitalRead(inPin);
while (val == HIGH)
{
digitalWrite(9, HIGH);
digitalWrite(8, HIGH);
val = digitalRead(inPin);
};
if (val == LOW)
{
digitalWrite(9, LOW);
digitalWrite(8, LOW);
};
motors.setSpeeds(0,0);// Motores detenidos
//-------------Instrucciones para Empezar a hacer la Calibracion de Sensores--------------------------------------//
delay(1500);
digitalWrite(9, HIGH);
digitalWrite(8, HIGH);// Enciende el leds para indicar que se esta calibrando.
for (int counter=0; counter<21; counter++)
{
if (counter < 6 || counter >= 15)
OrangutanMotors::setSpeeds(-velcalibrate, velcalibrate);
else
OrangutanMotors::setSpeeds(velcalibrate, -velcalibrate);
qtrrc.calibrate();
delay(20);
}
digitalWrite(9, LOW); // Apaga el led para indicar que se termino la calibracion.
digitalWrite(8, LOW);
OrangutanMotors::setSpeeds(0, 0);
delay(200);
digitalWrite(9, HIGH);
digitalWrite(8, HIGH);
delay(200);
digitalWrite(9, LOW); // Parpadeo para indicar que el robot esta listo.
digitalWrite(8, LOW);
delay(200); // Parpadeo para indicar que el robot esta listo.
digitalWrite(9, HIGH);
digitalWrite(8, HIGH); // Parpadeo para indicar que el robot esta listo.
delay(200);
digitalWrite(9, LOW); // Parpadeo para indicar que el robot esta listo.
digitalWrite(8, LOW);
delay(200);
//---------------------------Fin Calibracion de Sensores----------------------------------------------------//
pinMode(inPin,INPUT);
val = digitalRead(inPin);
while (val == HIGH)
{
digitalWrite(9, HIGH);
digitalWrite(8, HIGH);
val = digitalRead(inPin);
};
if (val == LOW)
{
digitalWrite(9, LOW);
digitalWrite(8, LOW);
delay(1000); // Retardo X segundos antes de Empezar a andar
};
}
unsigned int last_proportional = 0;
long integral = 0;
void loop()
{
unsigned int position = qtrrc.readLine(sensorValues); // leemos posicion de la linea en la variable position
// Referencia donde seguira la linea, mitad sensores.
int proportional = (int)position - 2500;
// Calculos PD
int derivative = proportional - last_proportional;
integral += proportional;
last_proportional = proportional;
int power_difference = proportional/VProporcional + integral*0 + derivative*VDerivativo;
if (power_difference > maximum)
power_difference = maximum;
if (power_difference < -maximum)
power_difference = -maximum;
if (power_difference < 0)
OrangutanMotors::setSpeeds(maximum, maximum + power_difference);
else
OrangutanMotors::setSpeeds(maximum - power_difference,maximum);
};