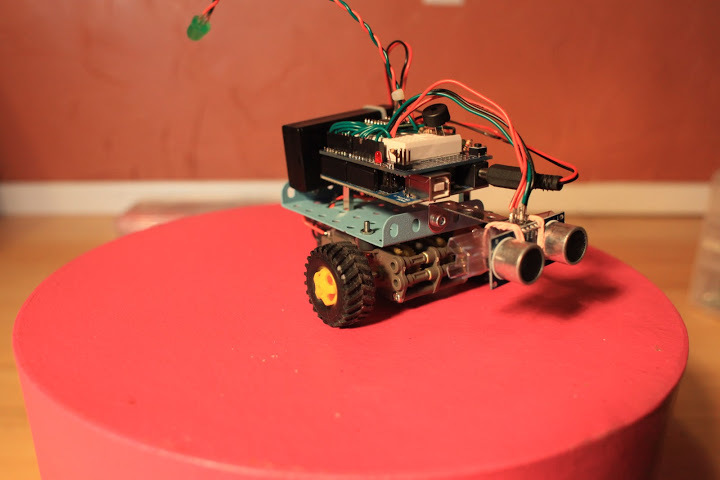
This was my first robot, and I originally built it using the round robot kit from Pololu. I liked the twin motor gearbox and the wheel/tires, but I decided to scrap the round base. I also bought the TB6612FNG motor driver and I am happy with that as well. ClusterBot is running an Arduino Uno mcu, and currently only has an Ultrasonic distance finder as a sensor. Clusterbot does simple object avoidance, and doesn’t do it particularly well yet because the HC-SR04’s have almost no peripheral vision. I’m either going to put the current sensor on a servo or just add another to improve. Thanks for looking!
http://youtu.be/ivvVy6KpTfU - YouTube link
http://www.meanpc.com/2012/01/hc-sr04-ultrasonic-sensor-added-to.html - Blog link
Original Bot:
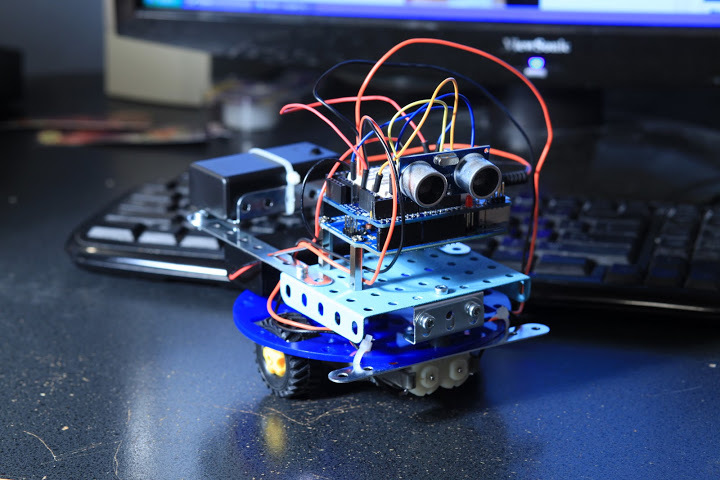
New bot: