
So I put this together over the summer of 2012 using the new Zumo chassis (before the zumo shield was available…)
The first version was built the week before the mini sumo competition at DragonCon and used a Zumo chassis, 100:1 high current micro gear motors, an Arduino Uno, a Sparkfun motor shield, 2 QTR-1A line sensors, and 2 medium range analog Sharp IR detectors. I also added onto the front blade a flip down blade. The box was custom built and also holds a 9V battery to drive the Arduino + sensors, with the Zumo’s 4 AA’s driving the motors.
Basic Chassis Built, no electronics or sensors added yet:


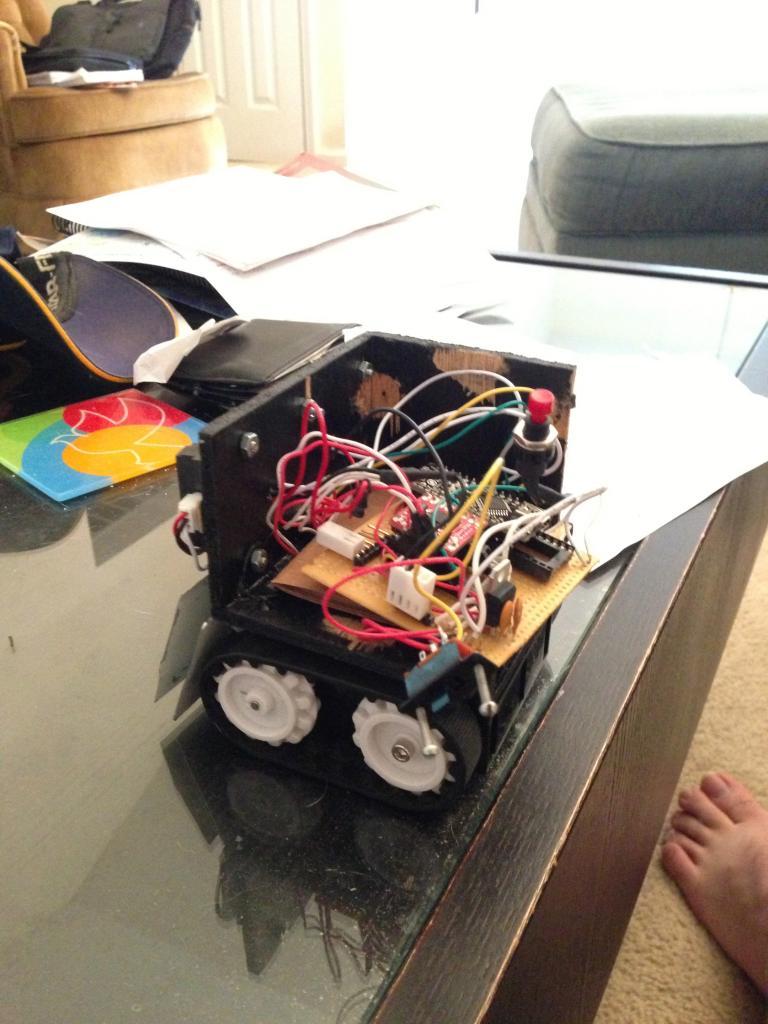
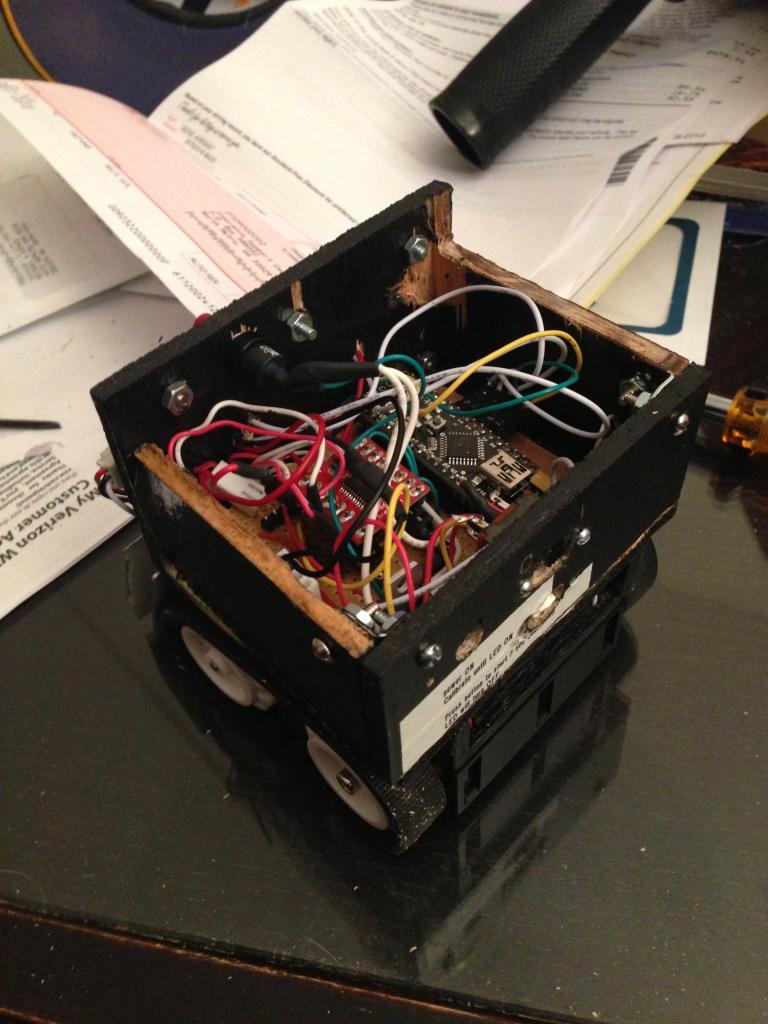
And with the sensors + internals

This version took 2nd place in the competition…
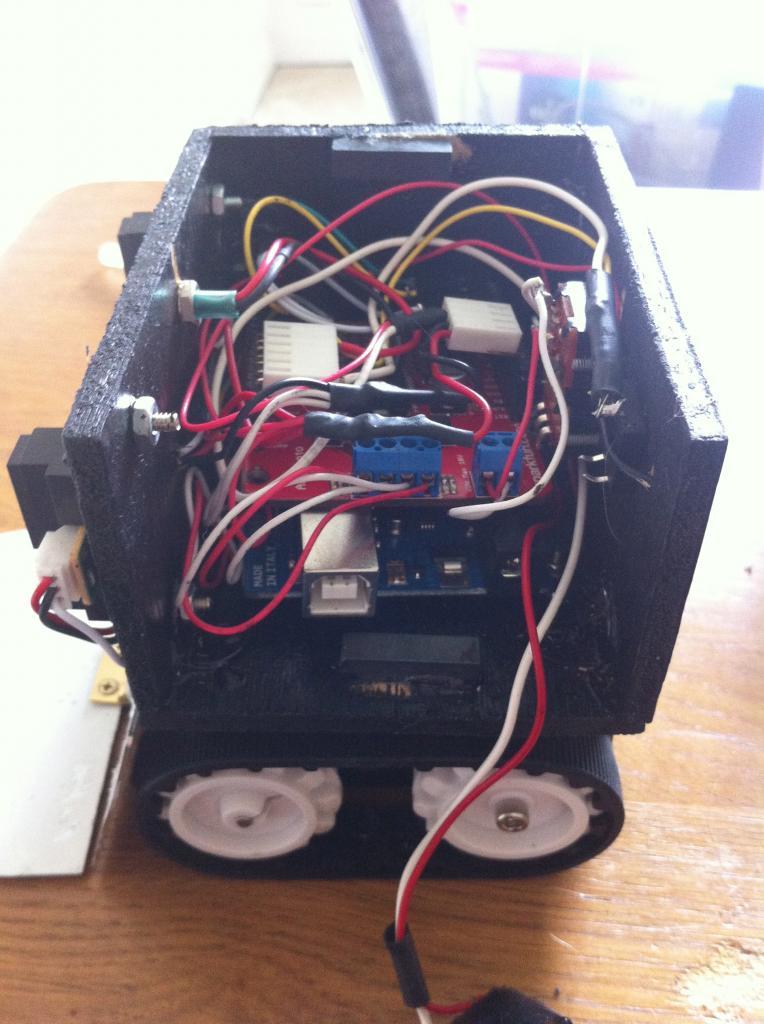
With that setup I was right up against the size and weight limits, and had zero wiggle room. So I decided to refine things a bit. Replacing the Uno with an Arduino Nano, and the motor shield with a TB6612FNG motor controller, cutting the box down a little bit, and adding a 3rd IR sensor in the middle, with the 2 outer ones angled out a bit. I also run it without the top on, which saved a bit more weight as well.
With this iteration I also improved the code a bit. I realized that I had been doing digital writes instead of analog PWM to the motor controller, so I fixed that and have much better speed control now. I also cut a hole in the bottom of the box to sink the 9V battery lower in the bot to lower the center of gravity.
The Mk2 version took 2nd place at the Atlanta Hobby Robotics Club Robot Rally competition (losing to the same opponent that it lost to at DragonCon.)
I’m now working on a new sumo using the zumo chassis + zumo shield. This new model is so low it might not even be detected by Bentobot given how high up Bento’s sensors are!
