Hi, I am currently trying to get the balancer example code working on the balboa 32u4, and am having trouble. In that example, the red light will turn on, and never turn off, suggesting that the robot is getting stuck during sensor calibration. I have been able to get other example code to run, but yet been able to get any sensor readings from either the gyro/accel or the magnetometer.
Any help would be appreciated
Hello.
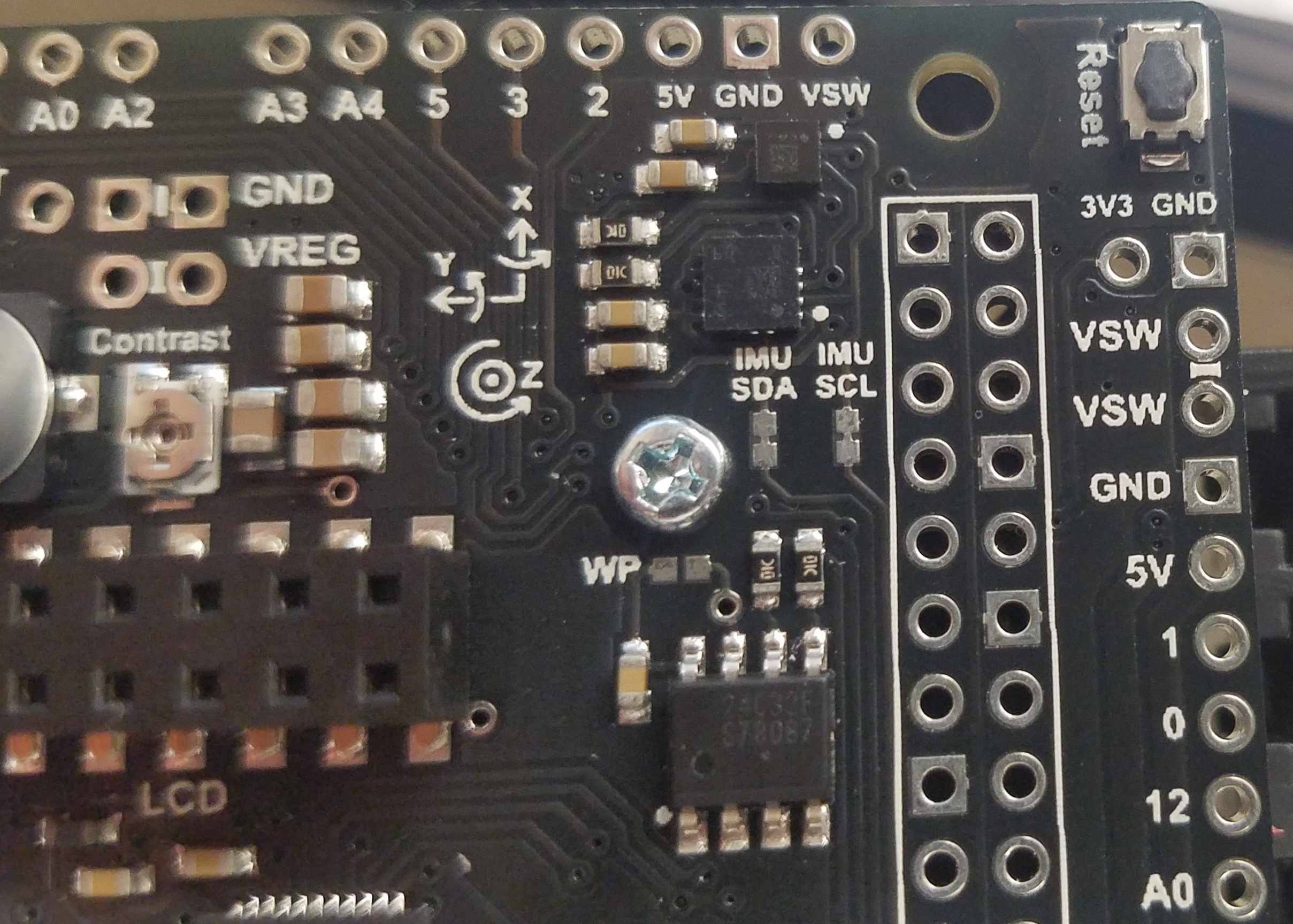
What does your serial monitor report when you run the InertialSensors example program? Do you have anything else connected to your Balboa 32U4 Control Board, or have you made any modifications to the control board? Can you post some pictures of the control board, specifically, around the top right corner?
-Patrick
Hi Patrick,
Nothing shows up on the serial monitor for the inertial sensors example. The only thing attached to the control board is the motors, and I haven’t made any modifications. A picture of the top right of the board should be attached.
Thanks
It is very strange that you are not seeing anything on the serial monitor. Even if the magnetometer or IMU is not working, the program should be continuously printing an error message. Do you see serial output for any of the other examples?
-Patrick
Yes, the PowerDetect example runs fine and prints the battery voltage to the serial monitor.
It could be that the Wire library is hanging in the programs that use the inertial sensors because SCL or SDA are shorted low. Can you take some more pictures of the complete board so that we can inspect the other components? Could you also try measuring the voltage of the IMU SDA and IMU SCL pads, as well as pins 2 and 3 when your Balboa is powered?
-Patrick
I checked SCL/SDA pads and pins 2/3 with both the inertial sensors code uploaded, as well as the just the blink example. With the blink example I found 3.2 volts on both pads, and 4.9 volts on the pins. With the inertial sensors example, the SCL pin was 2.95 volts, SDA was 0, pin 2 was 0, and pin 3 was 3.2 volts.
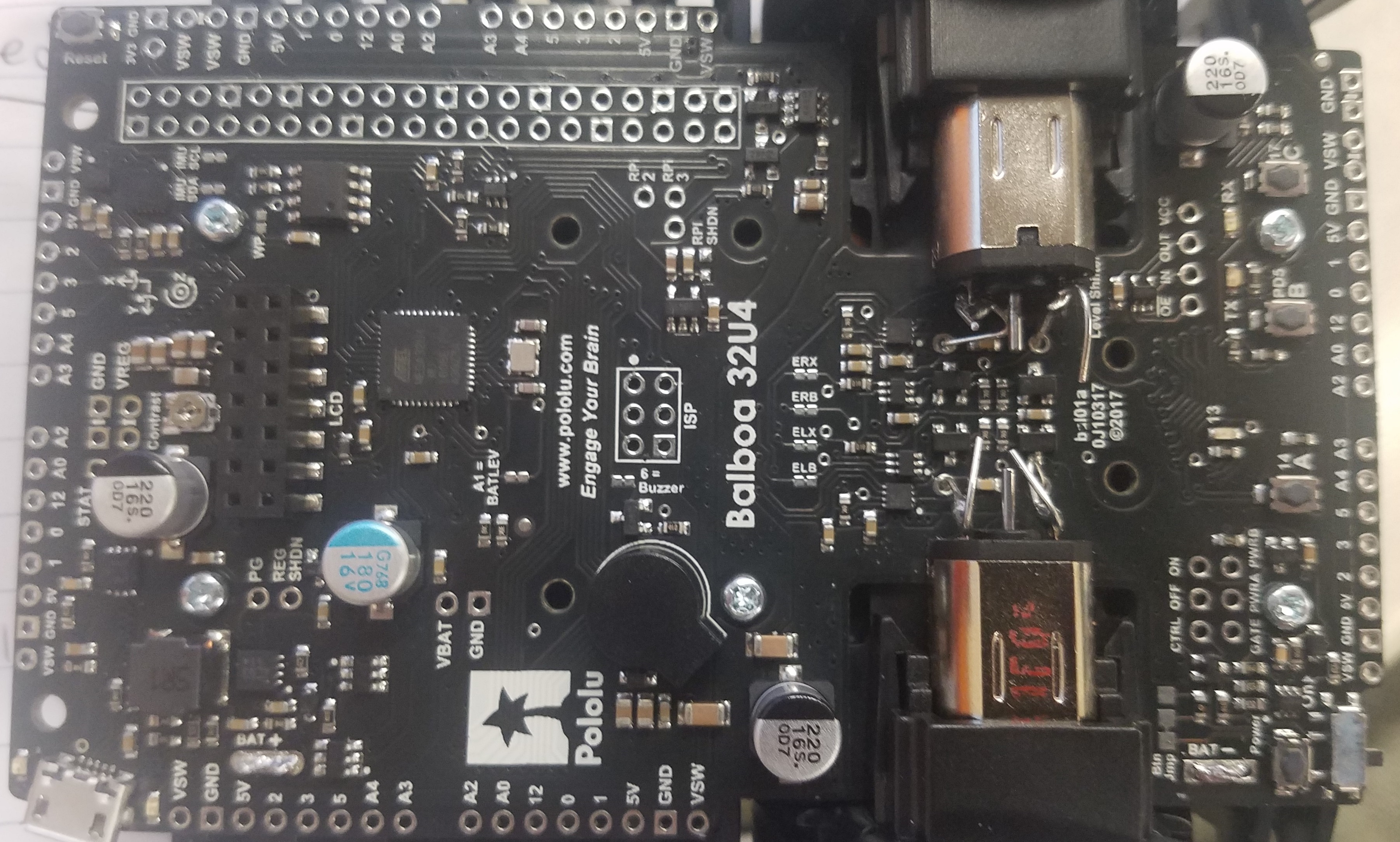
A picture of the entire board should be attached
At this point, it seems likely that your Balboa’s behavior is being caused by a hardware problem. Can you email your order information to support@pololu.com and reference to this thread so we can look into this further?
By the way, while I do not think this is contributing to your Balboa Control Board’s current issues, your soldering looks problematic. The Adafruit Guide to Excellent Soldering is a good reference that might be helpful for preventing problems such as cold joints, such as the ones on the battery terminals. Also, I would recommend trimming your motor power leads to length before soldering them to the motor terminals so that they can follow a straight line with minimal bending. As they are now, the leads are a shorting hazard and would obstruct proper installation of the magnetic disc on the motor back-shaft if you wanted to use the encoders.
-Patrick