
Hi there! I want to share my current project which is a hexapod robot using the Maestro 24 channel to coordinate all the servos in the legs. This hexapod uses 18 servos in six legs as well as three more servos in the “neck” that will eventually control head tilt and front leg rotation.
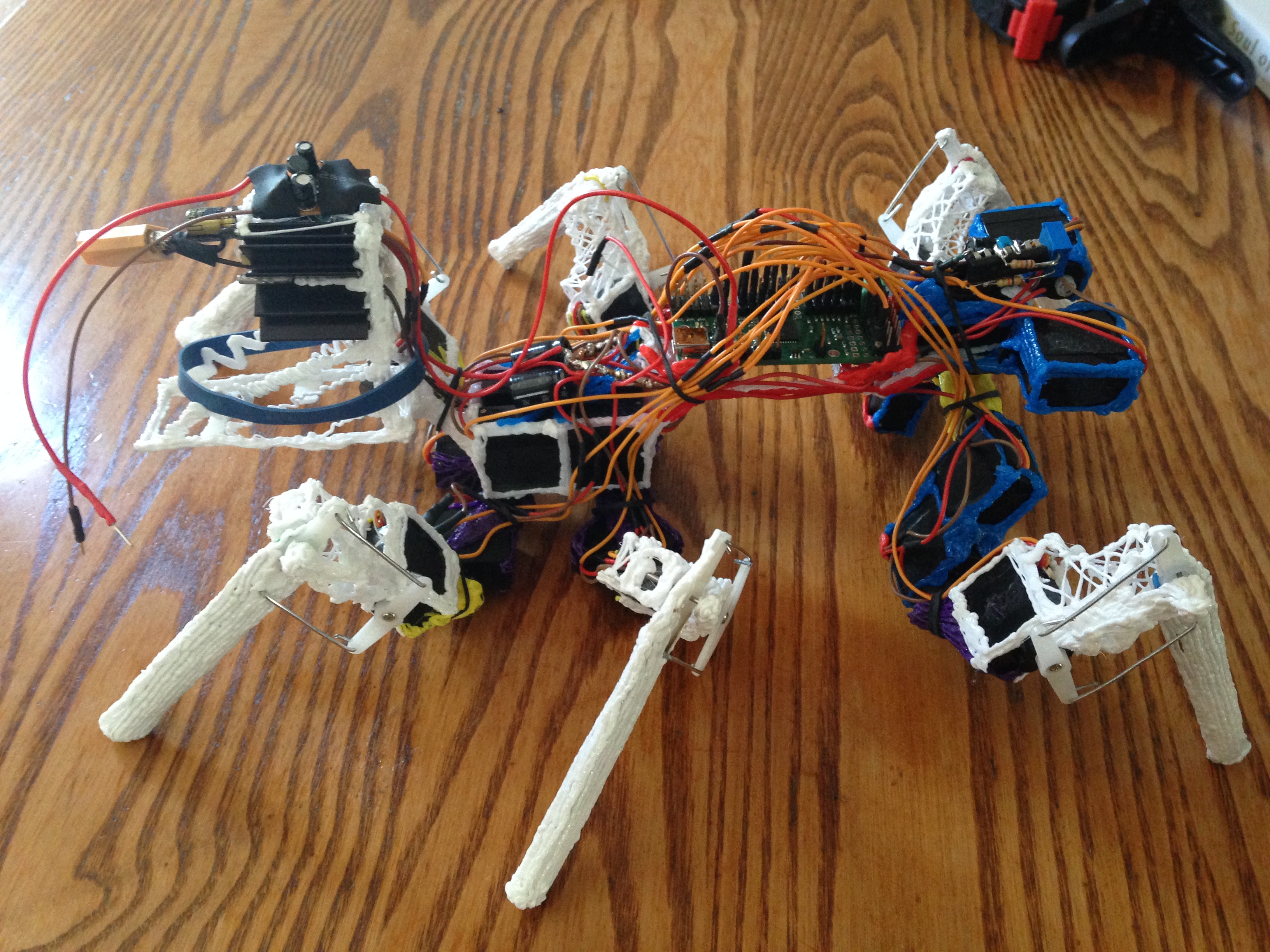
After my first rough prototype, I designed the new servo assembly virtually in Sketchup. Then I used a 3D pen to assemble the servos into this ant-like hexapod.
My goal is to create a biomimetic insectoid robot that walks, runs, and maybe in the far future, flies. I deliberately favored an insect form over traditional hexapod robot designs because I want my robots to be more like animatronics.
At the moment, I am troubleshooting and issue where the power supply drops from 5 to ~3 volts and the maestro sends an extremely short pulse to all the servo channels. As a result, the legs twist way beyond their safe limits and the servos begin to heat up. I hope to solve this soon before I burn out a motor or break gears!
This is my first attempt at using a digital microcontroller in a robot. Previous projects of mine have depended on analog circuits to create servo pulses that oscillate in duration.