
Hello all…short time lurker, first time poster…
the project: ride-on mecanum robot
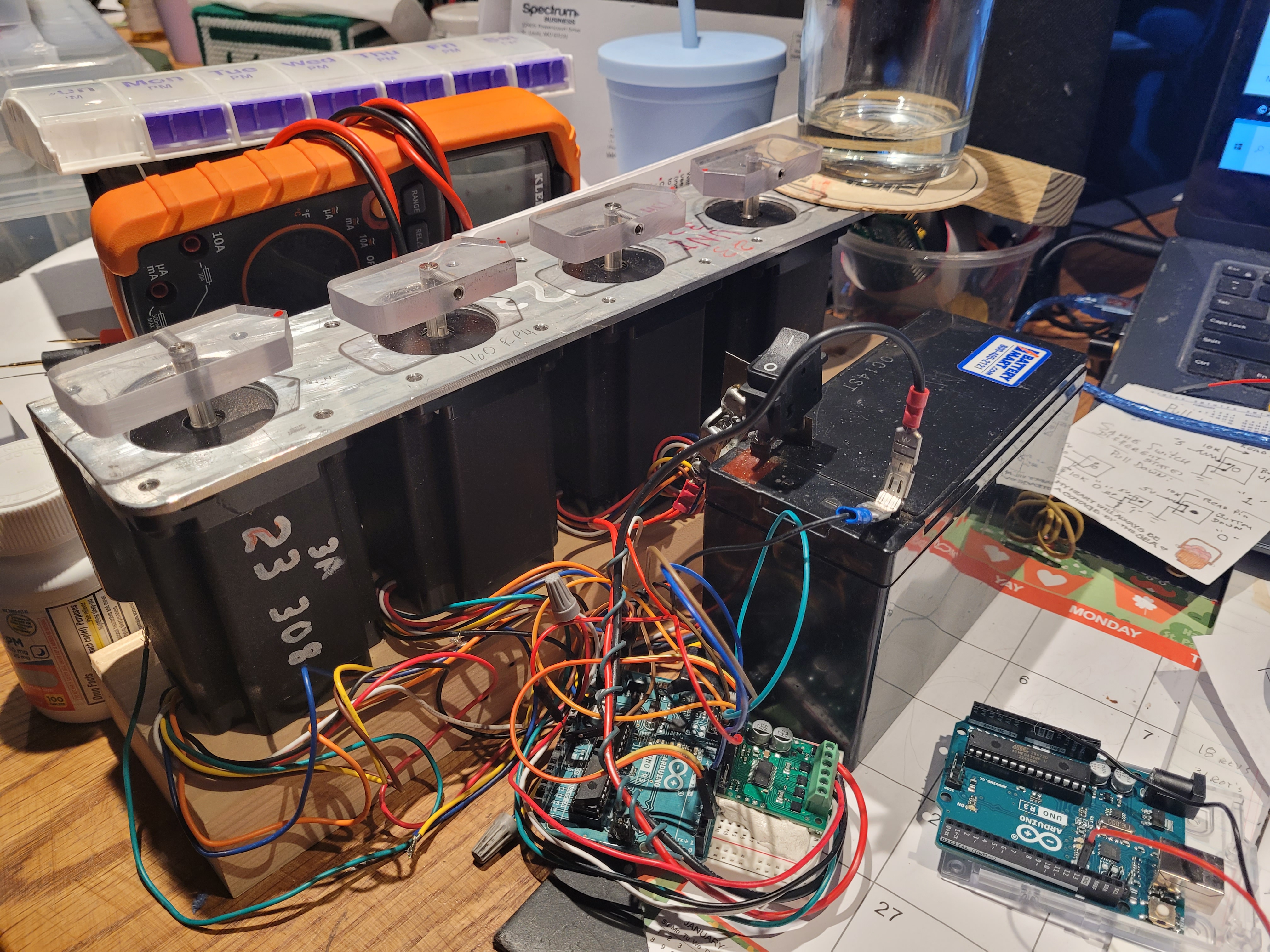
parts on hand (so far): (4) 23 series, 3A steppers mounted on a common piece of aluminum angle (for testing & convenience), lots of Adafruit stuff…Uno R3, sensors,bread boards, etc, a single 36v4, (4) 12vdc/7.2Ah sealed LA batteries, a BK 30V/2.5A PS, (4) 4" dia mechanum wheels (hex drive) complete machine shop I’ve owned/oper’ed for 40 years…an expectation I’ll be needing gear/timing belt reducers in the future…and a very rudimentary understanding of Sketches, C++ & coding…
So far, I can get (1) motor to run…fwd,rev, etc…it runs @ 160 rpm (measured)…I’m using BasicSteppingSPI.ino from the Library & I’ve played around with the different settings within that code…in the end, I need independant speed & direction of each of those motors…the (2) Arcade Joysticks I got from Digikey are being returned(they’re simple micro switches…by bad!) & the search continues for (1) or (2) ANALOG units of some type…a BT control is not ruled out…
So…now I need ideas & the "how to’s to interface all (4) motors
So…I’m asking you guys, way, way more knowledgeable than I how I should proceed…tonite I’ll make up (2) 'lil arrows to attach to the motor shafts & I’ll be happy when I can get independent operation, direction & speed of them here on my bench…your thoughts…PLEASE !!
oops…(4) arrows!
Hello.
The entire scope of your project is not very clear to me, and I am not even very sure about what you are asking, but it sounds like you want to control multiple stepper motors from a single stepper motor driver like the High-Power Stepper Motor Driver 36v4. Please note that if you want independent control, you will need a separate driver for each stepper motor.
By the way, it is very common for arcade joysticks to use simple microswitches, so you should be sure to look for one that is advertised as being analog (e.g. something like this joystick from Adafruit).
If you have some more specific questions or concerns that I did not address, could you try rephrasing them more clearly?
Brandon
Brandon…thank you for your reply !
Not trying to use a single driver board !
More than willing to get (3) more.
The (4) separate 23 series motors will each drive a single mecanum wheel, one wheel/motor at each corner…the mecanum wheels, which I have allow for some really funky robot motions…sideways motions while “looking” straight forward, for instance,…the complete robot mechanism will be fab’ed…
I have several analog joysticks now…they’re all small & “dainty”, I suspect anyone of them is more than good enough for my dummied up bench test rig.
I’ll continue on today with trying to get speed & direction from separate pots
of just the (1) motor I’ve been playing with & if you have a specific place or library you’d recommend for that, please do…!
As I may have mentioned, I’m a newbie to this…with a goal… I feel like I’m facing a huge sheet of water coming over the falls & I don’t know which way to turn…so, forward I go, picking my way thru…
thanks again,
gpdc
That is quite an ambitious project, but certainly a fun one!
I don’t much direct experience with Mecanum wheels, but my understanding is that they require fairly well tuned speed control, so stepper motors seem like a good way to handle that. This write-up looks like a good resource for understanding how to map the joystick movement to a motor speed.
If you have not gotten all of the High-Power Stepper Motor Drivers yet, you might consider using the Tic 36v4 Stepper Motor Controller instead. The Tic controllers have an onboard microcontroller that can take care of generating the step signals, making the programming a lot easier and freeing up overhead for your main controller. For example, once configured, you could just send the Tic controllers commands (via I2C or TTL serial) to give them a target velocity, and they will handle the rest, including acceleration and deceleration limiting (i.e. speed ramping). You can assign each Tic a unique device number, allowing you to use multiple Tic controllers from a single I2C or TTL serial bus as well. Additionally, we have an Arduino library for the Tic stepper motor controllers, too. I recommend reading through the product page and user’s guide to see if you think it would be a good fit for your application.
Brandon
AHHH HAAA…!!..now you’re getting it…
This whole thing must be (onboard) battery power…I’ll have 48 vdc available, more if/when req’d…driver dependant.
The “robot” will be whatever I make…from an F1 lookalike to a Radio Flyer wagon or somewhere in between…
Do the TIC controllers act like a microprocessor in the sense that they store & then run whatever sketch modifications I’ve made…before I reconnect to that usb cable , revise the sketch in the laptop, upload the revised sketch (to WHAT?..UNO or TIC controller & go out for another spin around & test it?
I’ll be looking into them shortly…
fwiw…there exist mecanum & their close relative “Omni” wheels…the mecanum will get me where I wanna be…sideways…lol
Many thanks to you…