OK, we have tried that. Here’s the results (StepPeriodUs = 8000, HPSDDecay<pde::AutoMixed, HPSDStepMode::MicroStep1)
12V @ 1000mA Motor moved, chattered badly, moved about 5/8 of a revolution at full stepping
13.7V @ 1500mA Motor moves, chatters much less, moves 4 revolutions at full stepping
Changing StepPeriodUs=2000
13.7V @ 1500mA, moves smoothly, 4 revolutions
13.7V @ 2500mA, moves smoothly, 4 revolutions, high torque, does not stop
24V @ 2500mA., unreliable motion, 4 revolutions, torque not good, skips even when not under load
This was the maximum the adjustable power supply. So we switched to a 30A 12V supply
12V @ 3500mA, fast and smooth
12V @ 4000mA, fast and smooth
Conclusion: 12V @ 4000mA works best so far
Reduced SetPeriodUs to 1000
13V @ 2500 mA, No torque, very buzzy, motor vibrates a lot
Changed SetPeriodUs to 3000
12.7V @ 2500mA, Runs great, but not as good as 12V @ 4000mA
24V @ 2500mA, Runs great, but not as good as 12V @ 4000mA
12V @ 2500mA, with our sketch, 8000uS, motor sits there and vibrates, does not turn
12V @ 2500mA, with our sketch, 3000uS, motor barely turns
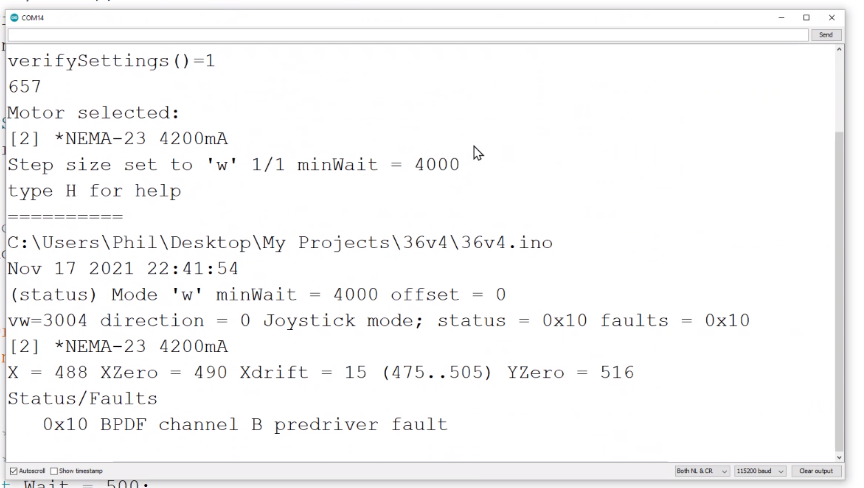
So we have now identified two conditions that improve it: lower voltage and lower delay. Our problem is now to figure out why our sketch does not work. But you have now given us a fixed point we know works, so now we will try to figure out what our program is doing wrong. Thank you. I will get back to you when we have more to report. One thing we did discover was that when we turned on debug printout, it started working, which suggests that the timing delay between steps is a factor. But we now know that even BasicSteppingSPI does not work at 36V @ 4000mA