Hello Kevin!
This is my version of Python. I think is correct.
If i change line while(1):
to
...
t=0
while t<1000:
t=t+1
... [/code]
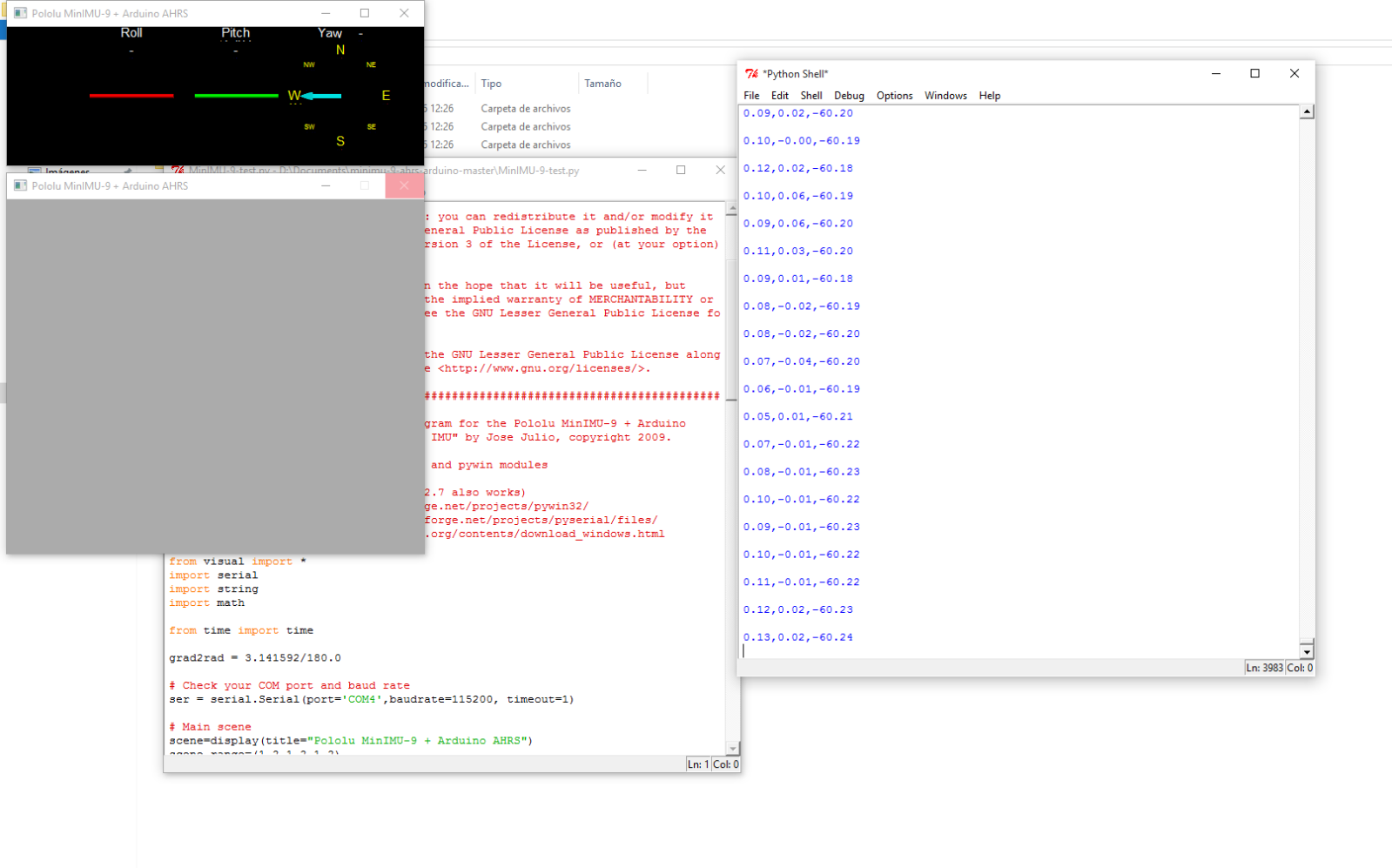
I get the correct answer at the end of the simulation!
[img]/uploads/default/original/2X/3/372ac2a86e56a9a2389b588777fea50f29e50e5f.png[/img]
Just in case, i send you the code (i've only modifed that and the COM port, rest is the same)
[code]# MinIMU9ArduinoAHRS
# Pololu MinIMU-9 + Arduino AHRS (Attitude and Heading Reference System)
# Copyright (c) 2011 Pololu Corporation.
# https://www.pololu.com/
# MinIMU9ArduinoAHRS is based on sf9domahrs by Doug Weibel and Jose Julio:
# http://code.google.com/p/sf9domahrs/
# sf9domahrs is based on ArduIMU v1.5 by Jordi Munoz and William Premerlani, Jose
# Julio and Doug Weibel:
# http://code.google.com/p/ardu-imu/
# MinIMU9ArduinoAHRS is free software: you can redistribute it and/or modify it
# under the terms of the GNU Lesser General Public License as published by the
# Free Software Foundation, either version 3 of the License, or (at your option)
# any later version.
# MinIMU9ArduinoAHRS is distributed in the hope that it will be useful, but
# WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or
# FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for
# more details.
# You should have received a copy of the GNU Lesser General Public License along
# with MinIMU9ArduinoAHRS. If not, see <http://www.gnu.org/licenses/>.
################################################################################
# This is a test/3D visualization program for the Pololu MinIMU-9 + Arduino
# AHRS, based on "Test for Razor 9DOF IMU" by Jose Julio, copyright 2009.
# This script needs VPython, pyserial and pywin modules
# First Install Python 2.6.4 (Python 2.7 also works)
# Install pywin from http://sourceforge.net/projects/pywin32/
# Install pyserial from http://sourceforge.net/projects/pyserial/files/
# Install VPython from http://vpython.org/contents/download_windows.html
from visual import *
import serial
import string
import math
from time import time
grad2rad = 3.141592/180.0
# Check your COM port and baud rate
ser = serial.Serial(port='COM4',baudrate=115200, timeout=1)
# Main scene
scene=display(title="Pololu MinIMU-9 + Arduino AHRS")
scene.range=(1.2,1.2,1.2)
#scene.forward = (0,-1,-0.25)
scene.forward = (1,0,-0.25)
scene.up=(0,0,1)
# Second scene (Roll, Pitch, Yaw)
scene2 = display(title='Pololu MinIMU-9 + Arduino AHRS',x=0, y=0, width=500, height=200,center=(0,0,0), background=(0,0,0))
scene2.range=(1,1,1)
scene.width=500
scene.y=200
scene2.select()
#Roll, Pitch, Yaw
cil_roll = cylinder(pos=(-0.4,0,0),axis=(0.2,0,0),radius=0.01,color=color.red)
cil_roll2 = cylinder(pos=(-0.4,0,0),axis=(-0.2,0,0),radius=0.01,color=color.red)
cil_pitch = cylinder(pos=(0.1,0,0),axis=(0.2,0,0),radius=0.01,color=color.green)
cil_pitch2 = cylinder(pos=(0.1,0,0),axis=(-0.2,0,0),radius=0.01,color=color.green)
#cil_course = cylinder(pos=(0.6,0,0),axis=(0.2,0,0),radius=0.01,color=color.blue)
#cil_course2 = cylinder(pos=(0.6,0,0),axis=(-0.2,0,0),radius=0.01,color=color.blue)
arrow_course = arrow(pos=(0.6,0,0),color=color.cyan,axis=(-0.2,0,0), shaftwidth=0.02, fixedwidth=1)
#Roll,Pitch,Yaw labels
label(pos=(-0.4,0.3,0),text="Roll",box=0,opacity=0)
label(pos=(0.1,0.3,0),text="Pitch",box=0,opacity=0)
label(pos=(0.55,0.3,0),text="Yaw",box=0,opacity=0)
label(pos=(0.6,0.22,0),text="N",box=0,opacity=0,color=color.yellow)
label(pos=(0.6,-0.22,0),text="S",box=0,opacity=0,color=color.yellow)
label(pos=(0.38,0,0),text="W",box=0,opacity=0,color=color.yellow)
label(pos=(0.82,0,0),text="E",box=0,opacity=0,color=color.yellow)
label(pos=(0.75,0.15,0),height=7,text="NE",box=0,color=color.yellow)
label(pos=(0.45,0.15,0),height=7,text="NW",box=0,color=color.yellow)
label(pos=(0.75,-0.15,0),height=7,text="SE",box=0,color=color.yellow)
label(pos=(0.45,-0.15,0),height=7,text="SW",box=0,color=color.yellow)
L1 = label(pos=(-0.4,0.22,0),text="-",box=0,opacity=0)
L2 = label(pos=(0.1,0.22,0),text="-",box=0,opacity=0)
L3 = label(pos=(0.7,0.3,0),text="-",box=0,opacity=0)
# Main scene objects
scene.select()
# Reference axis (x,y,z)
arrow(color=color.green,axis=(1,0,0), shaftwidth=0.02, fixedwidth=1)
arrow(color=color.green,axis=(0,-1,0), shaftwidth=0.02 , fixedwidth=1)
arrow(color=color.green,axis=(0,0,-1), shaftwidth=0.02, fixedwidth=1)
# labels
label(pos=(0,0,0.8),text="Pololu MinIMU-9 + Arduino AHRS",box=0,opacity=0)
label(pos=(1,0,0),text="X",box=0,opacity=0)
label(pos=(0,-1,0),text="Y",box=0,opacity=0)
label(pos=(0,0,-1),text="Z",box=0,opacity=0)
# IMU object
platform = box(length=1, height=0.05, width=1, color=color.blue)
p_line = box(length=1,height=0.08,width=0.1,color=color.yellow)
plat_arrow = arrow(color=color.green,axis=(1,0,0), shaftwidth=0.06, fixedwidth=1)
f = open("Serial"+str(time())+".txt", 'w')
roll=0
pitch=0
yaw=0
while (1):
line = ser.readline()
if line.find("!ANG:") != -1: # filter out incomplete (invalid) lines
line = line.replace("!ANG:","") # Delete "!ANG:"
print line
f.write(line) # Write to the output log file
words = string.split(line,",") # Fields split
if len(words) > 2:
try:
roll = float(words[0])*grad2rad
pitch = float(words[1])*grad2rad
yaw = float(words[2])*grad2rad
except:
print "Invalid line"
axis=(cos(pitch)*cos(yaw),-cos(pitch)*sin(yaw),sin(pitch))
up=(sin(roll)*sin(yaw)+cos(roll)*sin(pitch)*cos(yaw),sin(roll)*cos(yaw)-cos(roll)*sin(pitch)*sin(yaw),-cos(roll)*cos(pitch))
platform.axis=axis
platform.up=up
platform.length=1.0
platform.width=0.65
plat_arrow.axis=axis
plat_arrow.up=up
plat_arrow.length=0.8
p_line.axis=axis
p_line.up=up
cil_roll.axis=(0.2*cos(roll),0.2*sin(roll),0)
cil_roll2.axis=(-0.2*cos(roll),-0.2*sin(roll),0)
cil_pitch.axis=(0.2*cos(pitch),0.2*sin(pitch),0)
cil_pitch2.axis=(-0.2*cos(pitch),-0.2*sin(pitch),0)
arrow_course.axis=(0.2*sin(yaw),0.2*cos(yaw),0)
L1.text = str(float(words[0]))
L2.text = str(float(words[1]))
L3.text = str(float(words[2]))
ser.close
f.close
Thanks a lot