How do you control a Maestro 24 from Linux?
I just received a Maestro 24 and I tried following the setup instructions included with maestro-linux-150116.tar.gz for using it on Ubuntu 14.04, but it seems to have no effect.
Following the README, I ran:
sudo apt-get install libusb-1.0-0-dev mono-runtime libmono-winforms2.0-cil
sudo cp 99-pololu.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules
./MaestroControlCenter
The control center launches and shows no errors in either the GUI or terminal. The Maestro’s yellow light steadily blinks, and the green light begins quickly blinking.
I have a Hitec HS-300 standard hobby servo attached to channel 0, but enabling channel 0 and moving the position slider has no effect on the servo. The yellow light flashes twice indicating “at least one of the servos is enabled”, but the servo doesn’t move. When I first enable channel 0, a prompt warns me that “The servo controller is currently configured to detect serial baud rate. Until it has detected the baud rate, it will not be able to control servos. Do you want to change the serial mode to UART, 9600 baud and apply all settings now?”
What is the point of this message? Of course I don’t want to limp along at 9600 baud. I thought the selling point of the Maestros was that they can run at a high baud rate? Regardless, it doesn’t seem to matter. Clicking “cancel”, to auto-detect the baud rate, or clicking “ok” to switch to 9600 baud has the same effect in that it can still not control any servos.
I’ve tried various configurations:
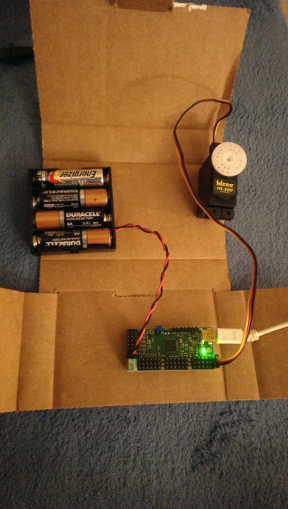
- without external power, using only USB
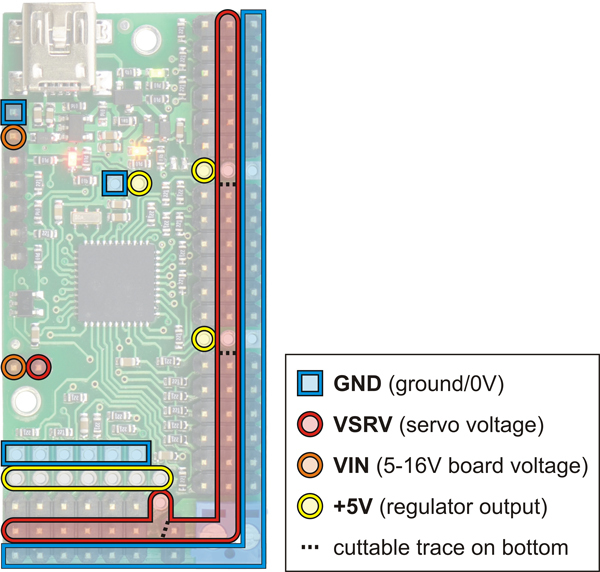
- with an external 5V supply
- with three different servos
- with the servo on different channels
But none of these configurations work
I verified all the servos I used worked by controlling them from an Arduino using the simple Sweep example.
I’ve also tried controlling it from Python, but even though it throws no errors, it too has no effect.
How do I get this running on Linux? Is my Maestro DOA?