I just brought a couple of the new TB67S128FTG motor drivers, they are great and offer tons of new functions.
However, I’m having trouble getting the motor to run at the right speeds. I’m using an Arduino, and I will be posting the code down below.
The issue I’m facing is that when I lower the delay between steps, the motor speed does not ramp up as much as expected (expect speed to increase by 1 rpm but in reality, it increased by 0.4). And this issue becomes more serious at higher speeds.
I’m familiar with DRV8825s and AMIS-30543s. This is the first time I encountered this issue.
You talk about relative changes in speed (e.g. a 1 RPM increase produces an actual increase of 0.4 RPM), but that is not so helpful since the performance of your program is affected by the actual speed. Can you give me some absolute numbers for the speed are you setting and speed are you observing? Also, how are you measuring the actual speed of your stepper motor?
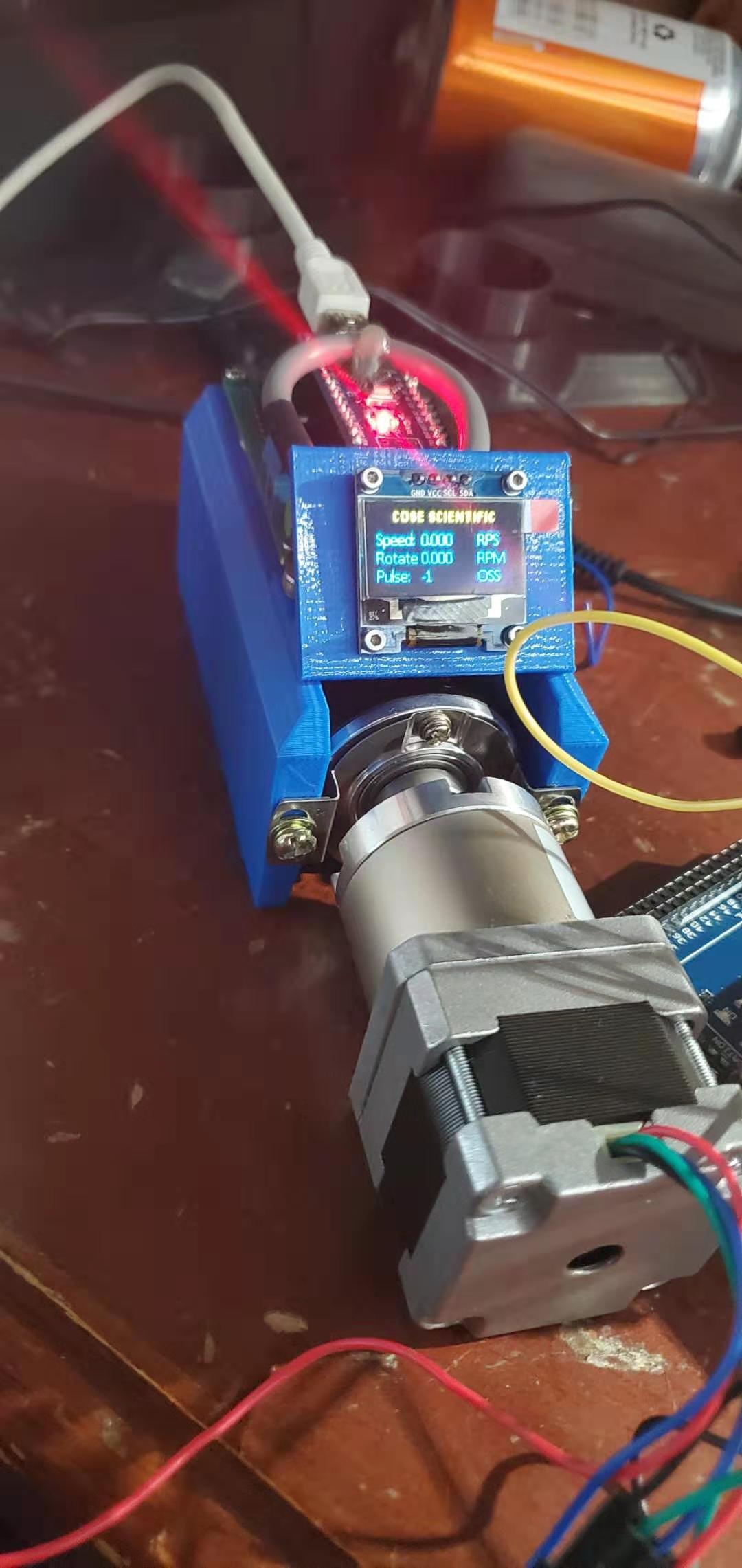
Thank you for your reply, I’m using an encoder based speed monitoring rig I built myself. I’ve tested it with other drivers and find it to be relatively reliable.