UPDATE
Problem solved. The new PololuQik library solved my problems.
I guess the reason is the improved timing in the serial communication with the board.
The wheels of the bus are now going round and round 
Thank you Kevin!
UPDATE
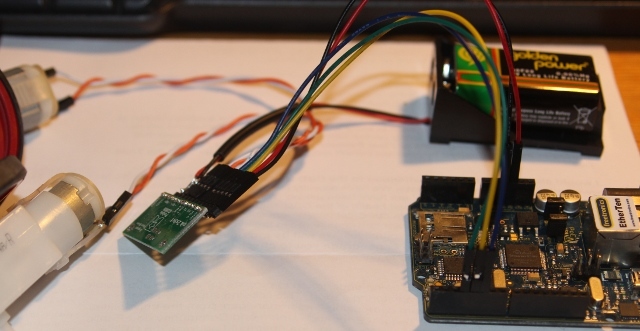
I have a similar situation - new Qik2s9v1, new small 240:1 motors, Freeduino EtherTen board. Wired up properly, I think (board Rx goes to Qik Tx and vv.). 5V on board, for logic, separate 9V supply for motors (Motor Vcc and GND). System: Arduino 1.0.1 on Ubuntu 10.4 with USB link to Freeduino.
–UPDATE–
Demo mode (short jumpers A and B together) works, the motors 0 and 1 are moving back and forth. Not too fast (240:1 and nearly empty 9V batt), but they move anyway.
Fixed baud rate at 38400bps changes things a bit - error LED remains OFF but serial communications still seems to be bugged - I only get 0xFF back from the SoftwareSerial line, it seems.
–
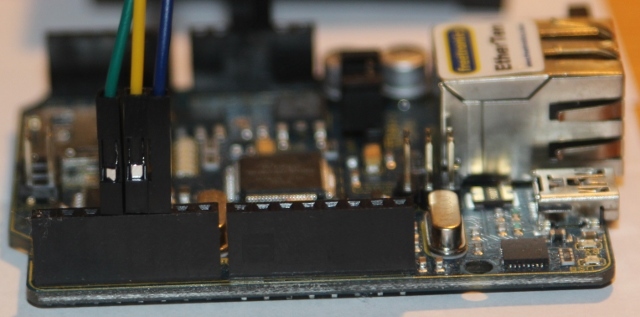
Pins:
Duino --- Qik
GND ---- GND
5V ------ Vcc
3 -------- TX
4 -------- RX
5 -------- RST
n.c. ---- ERR
Mot1- --- M1-
Mot1+ --- M1+
Mot0- --- M0-
Mot0+ --- M0+
9V- ----- GND
9V+ ----- VmotJumpers A and B not used, unless testing demo mode and fixed baud rate.
Freeduino Code:
#include <CompactQik2s9v1.h>
#include <SoftwareSerial.h>
/*
Important Note:
The rxPin goes to the Qik's "TX" pin
The txPin goes to the Qik's "RX" pin
*/
#define rxPin 3
#define txPin 4
#define rstPin 5
SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin, false);
CompactQik2s9v1 motor = CompactQik2s9v1(&mySerial,rstPin);
void setup()
{ // initialize Serial monitor and SoftwareSerial for Qik comms
Serial.begin(9600);
mySerial.begin(9600);
// initialize motor, stop both of them
motor.begin();
motor.stopBothMotors();
// rx/tx comms sync, then error LED comes on permanently
// so let's grab the error information and some other details if we can
int ID = motor.getDeviceID();
Serial.print("Device ID: ");
Serial.println(ID);
int fwv = motor.getFirmwareVersion();
Serial.print("Firmware version: ");
Serial.println(fwv);
int err = motor.getError();
Serial.print("Error: ");
Serial.println(err);
boolean doe = motor.hasDataOverrunError();
Serial.print("Data overrun: ");
if (doe) Serial.println("TRUE"); else Serial.println("FALSE");
boolean fe = motor.hasFrameError();
Serial.print("Frame error: ");
if (fe) Serial.println("TRUE"); else Serial.println("FALSE");
boolean crc = motor.hasCRCError();
Serial.print("CRC error: ");
if (crc) Serial.println("TRUE"); else Serial.println("FALSE");
boolean fmt = motor.hasFormatError();
Serial.print("Format error: ");
if (fmt) Serial.println("TRUE"); else Serial.println("FALSE");
boolean tim = motor.hasTimeoutError();
Serial.print("Timeout error: ");
if (tim) Serial.println("TRUE"); else Serial.println("FALSE");
// try to do something with the motors
motor.motor0Forward(16);
motor.motor1Forward(16);
}
void loop()
{ // nothing to do
}Result:
- red error LED blinks around 3x (serial baud rate detection), then remains ON. Sending get_error() code does not change anything;
- green status is green and blinking every 0.4s, error pin voltage is around 5Vdc;
- nothing happening with the motors, they can be moved by hand;
- Serial (USB) monitor output at 9600 baud:
Device ID: 255
Firmware version: 255
Error: 255
Data overrun: TRUE
Frame error: TRUE
CRC error: TRUE
Format error: TRUE
Timeout error: TRUEDunno what I did wrong… everything which is being read back seems to be 0xFF. Would be OK for the error (although bits 0…2 are supposedly not used) but at least the Device ID and the FirmwareVersion should read something else but 0xFF, wouldn’t you think?
There is around 10Vac on the rx pin of the Qik (so something is coming in there) and also on the tx pin of the Qik, so it seems to be acknowledging the incoming signal even though loop() does nothing. (Sorry, I have no scope available, but a vintage voltmeter instead …).
Any clues anyone? Perhaps the bug (if any) is actually in the SoftwareSerial stuff, I don’t know.
UPDATE
Problem solved. The new PololuQik library solved my problems.
I guess the reason is the improved timing in the serial communication with the board.
The wheels of the bus are now going round and round
Thank you Kevin!
UPDATE
Otte