Hello. I purchased a Pololu Micro Dual Serial Motor Controller and I still have not been able to make the controller or this configuration work.
I may have supplied too much voltage (12V) and thereby damaged the controller.
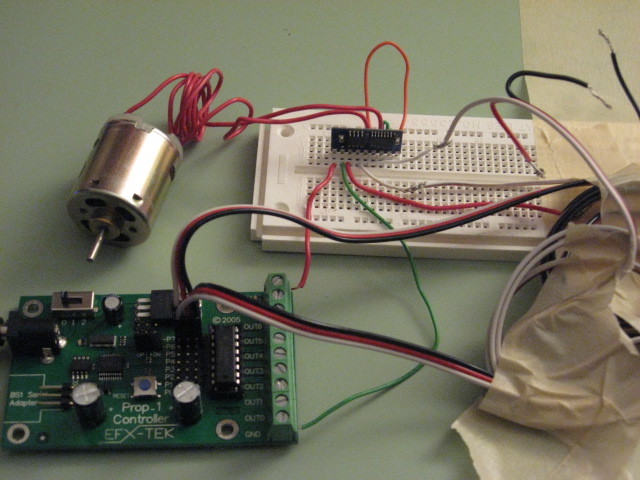
Please see included code, attached picture, and picture notes and help me answer the question… should this work??? and what WILL work??? I am new at this so please be specific about connection advice.
PICTURE NOTES:
EFX-TEK Prop1 Controller with BasicStamp1
3-pin Connection 6 - RESET, jumper in UP position
3-pin Connection 7 - LOGIC SUPPLY and SERIAL CONTROL INPUT, jumper in UP position
ULN 2003 installed. No ULN on Connection 7 (should there be NO ULN at all??)
Connection 6 “W” - reset
Connection 6 “R” - ??? I dont know where
Connection 6 “B” - ??? I dont know where
Connection 7 “W” - serial control
Connection 7 “R” - logic supply
Connection 7 “B” - ??? I dont know where(grounded?)
V+ had 12V (should there have been a simple resistor in series to drop the V to acceptable level?)
Motor Controller Pins 6 and 9 to positive motor
Motor Controller Pins 7 and 8 to negative motor
CODE: this code simply makes the motor speed up and slow down in one direction… then speed up and slow down in the other direction…
' {$STAMP BS1}
' {$PBASIC 1.0}
'
' =======================================================
' -----[ I/O Definitions ]-------------------------------------------------
SYMBOL TX = 7 ' SETUP = UP; no ULN
SYMBOL MReset = 6 ' SETUP = UP; no ULN
' -----[ Constants ]-------------------------------------------------------
SYMBOL IsOn = 1 ' for active-high in/out
SYMBOL IsOff = 0
SYMBOL Yes = 1
SYMBOL No = 0
SYMBOL Baud = T2400
' -----[ Variables ]-------------------------------------------------------
SYMBOL speed = B2
' -----[ Initialization ]--------------------------------------------------
Reset:
PINS = %11000000 ' clear all
DIRS = %11000000 ' set outputs
PULSOUT MReset, 1
PAUSE 100
' -----[ Program Code ]----------------------------------------------------
Main:
FOR speed = 0 TO 127
SEROUT TX, Baud, ($80, $00, $00, speed)
PAUSE 20
NEXT
FOR speed = 127 TO 0 STEP - 1
SEROUT TX, Baud, ($80, $00, $00, speed)
PAUSE 20
NEXT
FOR speed = 0 TO 127
SEROUT TX, Baud, ($80, $00, $01, speed)
PAUSE 20
NEXT
FOR speed = 127 TO 0 STEP - 1
SEROUT TX, Baud, ($80, $00, $01, speed)
PAUSE 20
NEXT
GOTO Main