I got 2 controllers - each connected to a motor. Each motor is connected with a gearbox driving 3 wheels.
The 2 controllers are connected to an RC-Receiver with the left stick for throttle and the right stick for left-right. The motors are configured left-mixing mode and right-mixing mode.
So far so good … driving forward I can drive left and right with no problem … but driving backwards the steering direction is reversed. How can this happen? Putting the throttle up the little dot in the box moves and with steering left it moves left and steering right it moves right - so the input signal seems sound to me.
It would be nice if anyone could point me in the right direction.
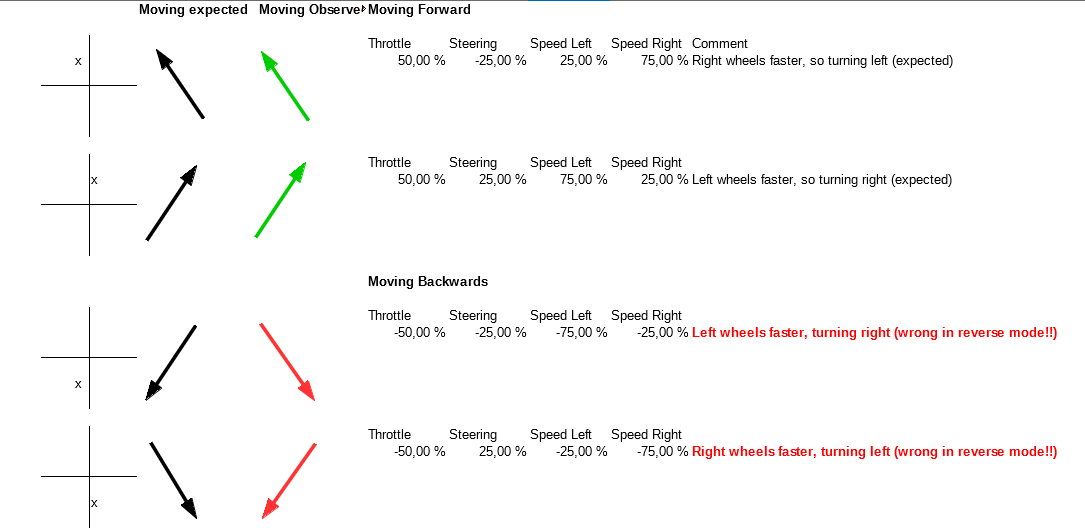
A Simple Motor Controller set to left mixing mode obtains motor speed by summing the throttle and steering channels (CH1+CH2), while right mixing mode obtains motor speed by taking the difference of the throttle and steering channels (CH1-CH2). Does this match what you are seeing? If not, can you describe or post a video of what your Simple Motor Controllers are doing instead?
From this diagram I come to beliefe that if the controller is in “reverse”-mode … namely the person driving the vehicle is driving backwards … then left and right mixing mode should be reversed too to come to the expected behavior.
Example … driving your car … if you are in reverse then steering to the left should move the vehicle to the left too!
The mixing mode we have is a common method for hobby RC controllers. It does not work like a car because the robot is using differential steering. If you want to implement your own mixing, you could add in a microcontroller that reads your RC signals and commands the Simple Motor Controllers how you want.
You might consider what you want the robot to do when the steering stick is at 100% and the throttle stick is at -1% or 1%. In both cases, the mixing mode provided by the Simple Motor Controller will make your robot more or less spin in place by driving the left wheel forward and the right wheel backwards.