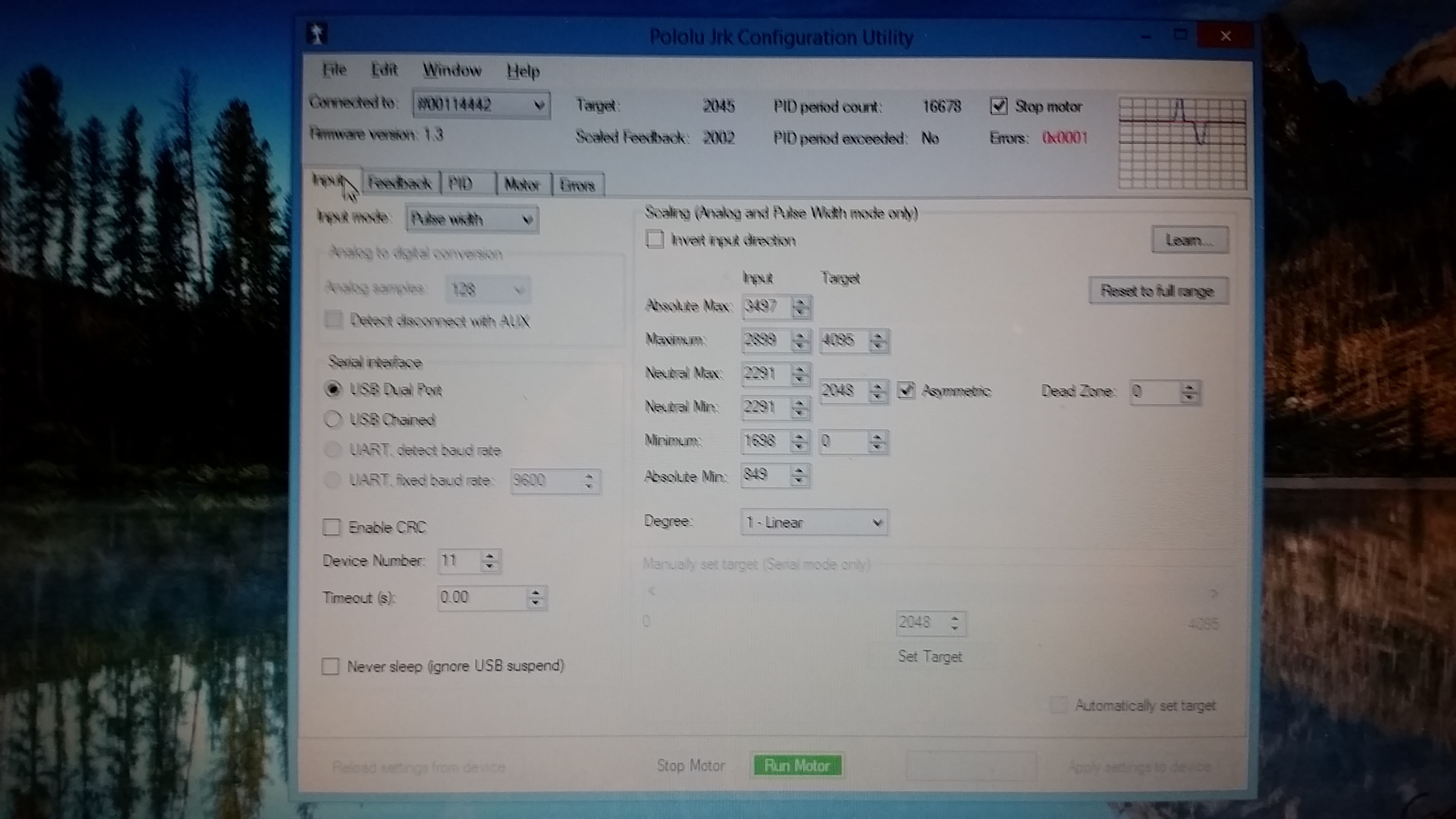
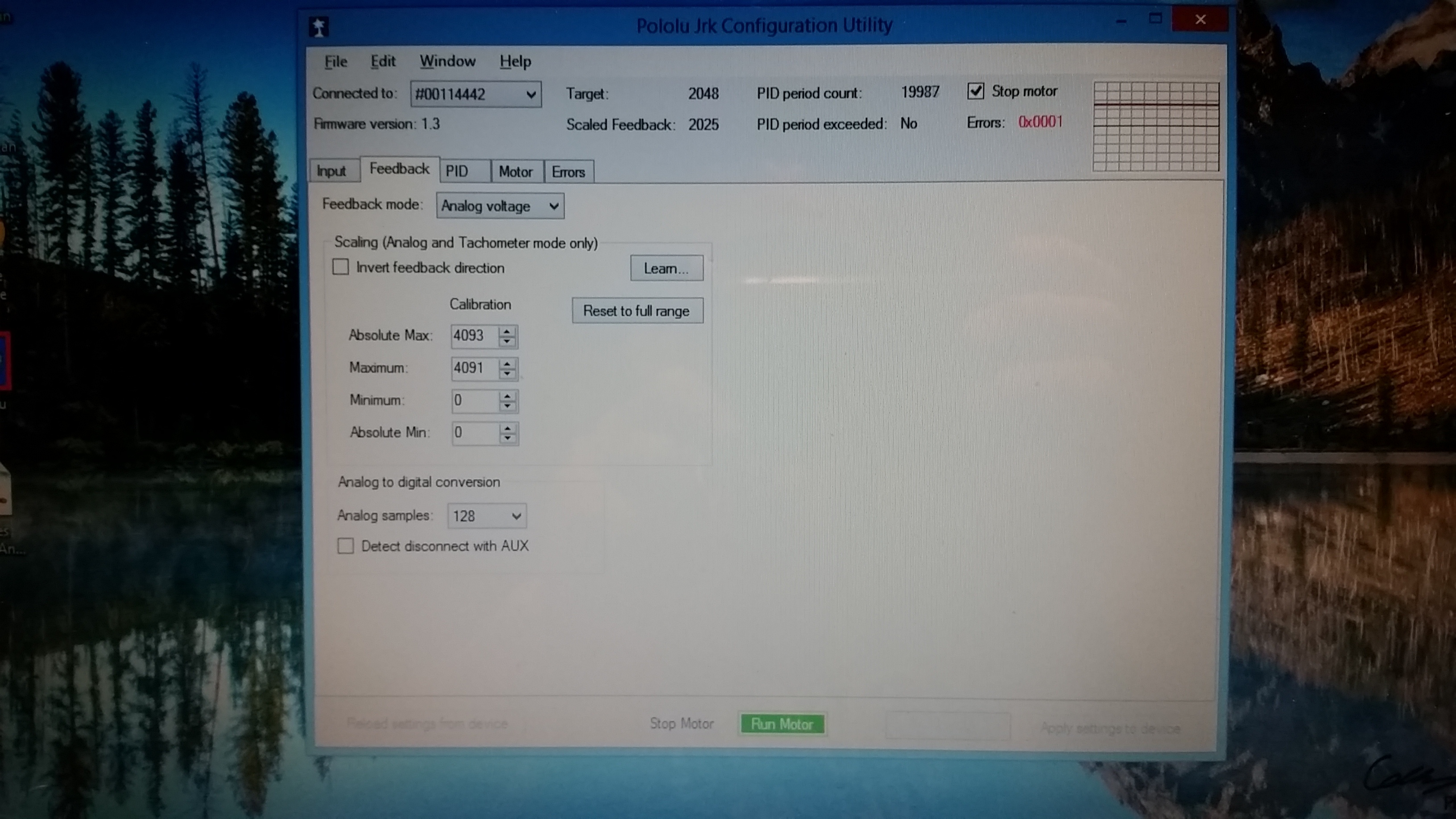
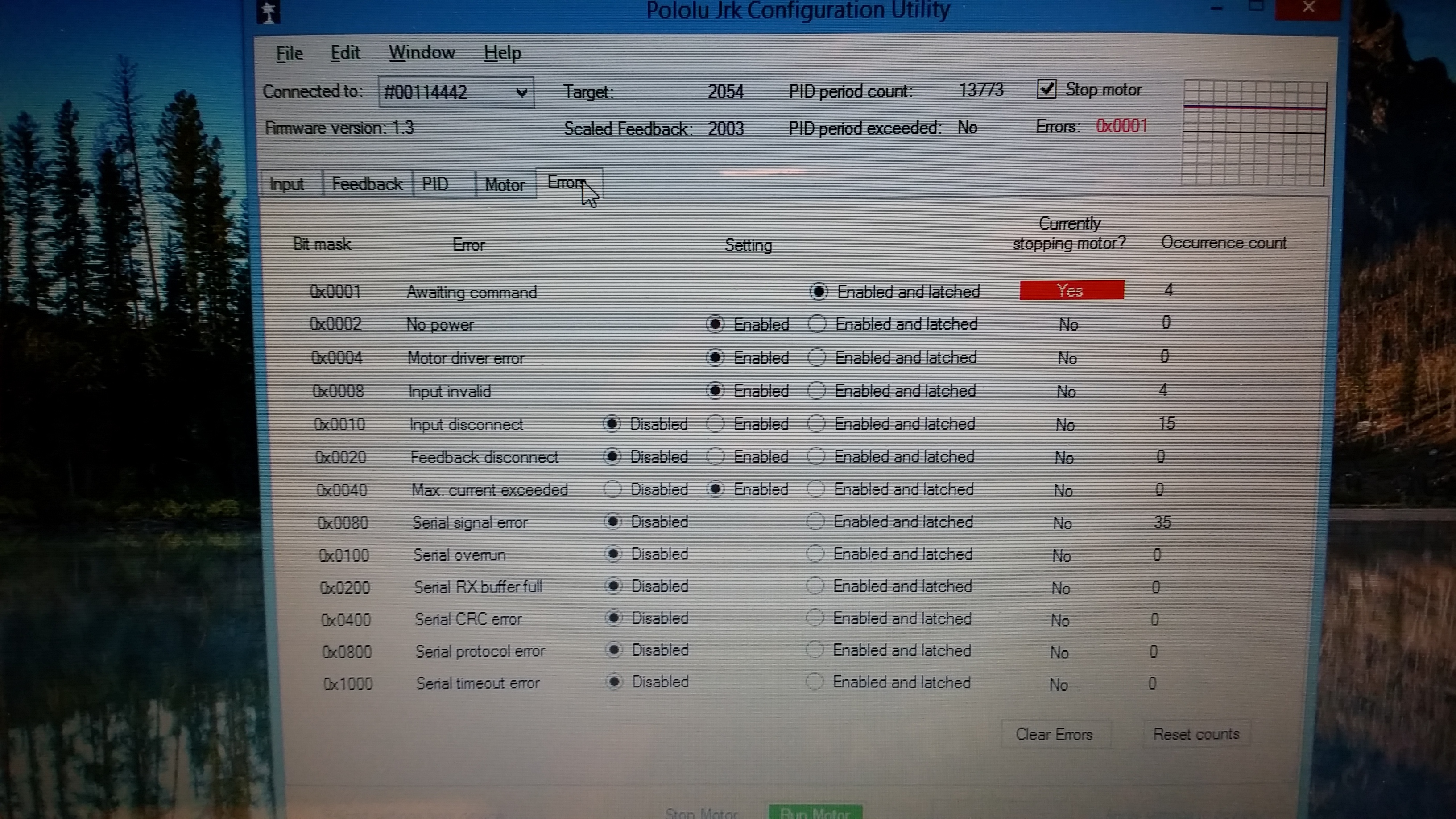
Hoping someone can help me figure out what I did wrong here. I am trying to control a wiper motor using a Futaba radio and receiver through the Pololu jrk 21v3. Everything is powered and connected properly, I am getting a signal from the Futaba and the feedback potentiometer, just can’t get the motor to turn. I know the motor works because when I use the Detect Motor Direction function it moves it in both directions only when the feedback chain is off. When it’s on, it moves just a tiny bit before stopping. The image of the Error page below shows the results of that test.
I’ve included pictures of everything. Feel free to ask me any questions.
Thanks again,
Mike
And sorry about the computer pics, I have no idea how to take a screenshot on a PC!
Hello.
It looks like your picture showing the “Errors” tab is missing; however, I noticed that the error given at the top of the Simple Motor Control Center is the “Awaiting Command” error, which should go away when you click on the green “Run Motor” button.
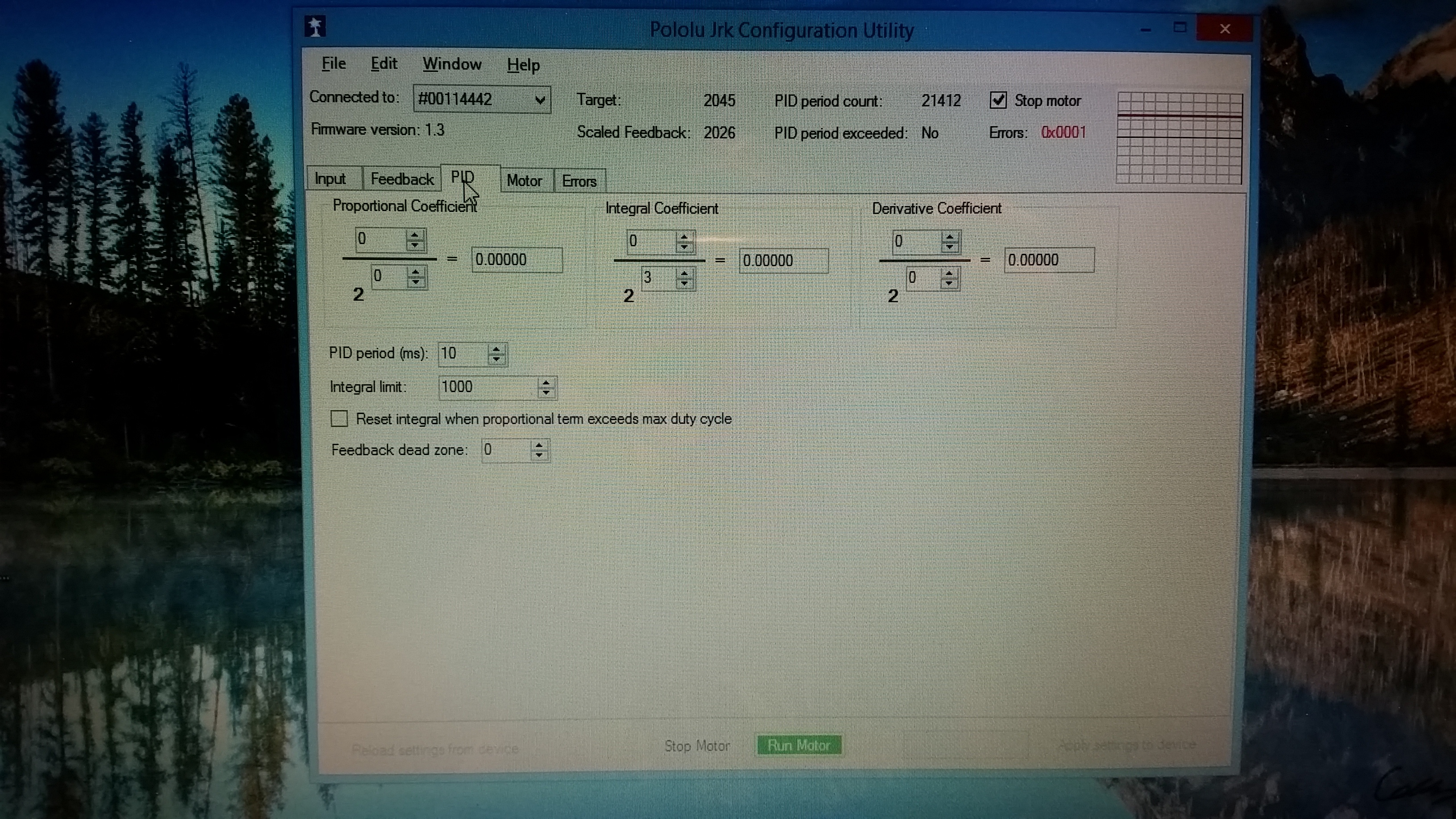
It also looks like you have all of your PID coefficients set to 0, which will stop the motor from running when using feedback. You will need to tune these coefficients to get your system running how you want it to. You can find tips for doing so in the “Setting Up Your System” section of the jrk controller’s user’s guide and this “PID controller entry on Wikipedia”.
-Brandon
I didn’t even know about that part! I’ll check it out and let you know how it works. What are some good initial settings? Looking to have the motor turn 180 degrees each way. Here’s the Error page:
Good PID coefficients will depend heavily on your system, but for initial values to start calibrating, I recommend starting with setting P to 1 with I and D set to 0, then using one of the methods described in the links from my previous post.
-Brandon
Success! I didn’t realize that was all I needed to do. It seems like there is lot to tuning the PID correctly but I don’t need much precision so 1, 0, 0 worked fine. Thanks again!