Hi all,
This is my first post. I have a Romi chassis with the power distribution motor driver board; however, I can’t get it to work. I have not located any user guides or tutorial that explains how the connections to the Arduino go.
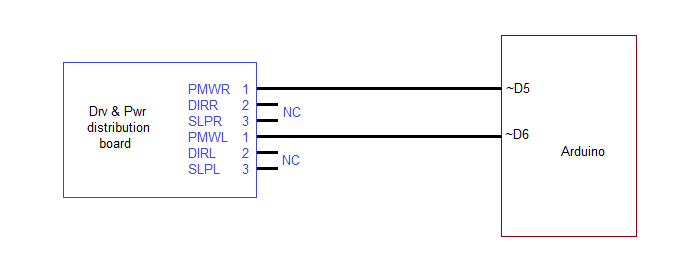
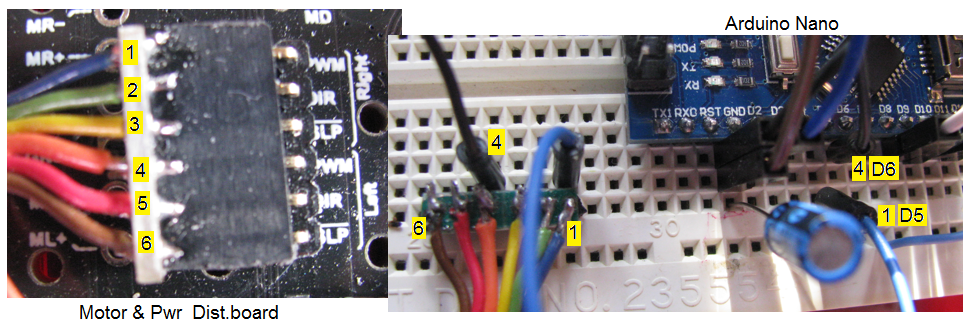
At this time I have the following:
DIR and /SLP: Not connected. At this time I am only interested in the motor speed control.
PWMR — A5
PWML —A6
The code:
Setup():
pinMode(5, OUTPUT); // Right motor
pinMode(6, OUTPUT);
Loop():
analogWrite (5,120); // Right motor
analogWrite (6,120);
To test different speeds, I vary the 120 constant. At this time, the motors spin at full speed as soon as I apply power and the value does not seem to matter.
I read the detailed information in the description page and noticed the truth table; however, I am not sure I am implementing this correctly. Is there an instruction or user guide that I can look at? Examples?
Thank you! SGarciav