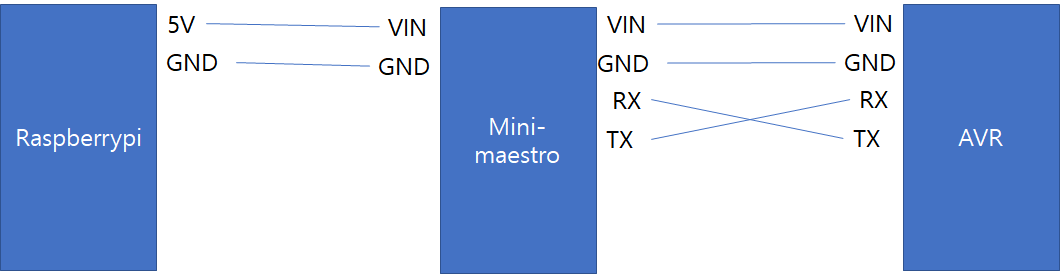
First of all, what I want is to control mini-maestro and Atmega328 with Raspberry pi.
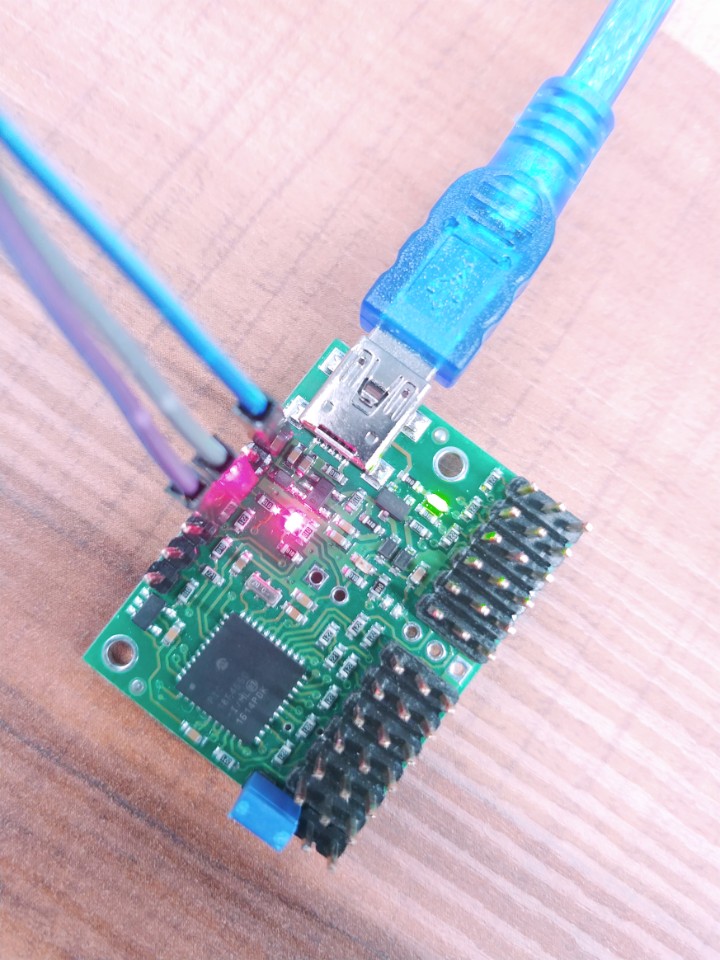
I connect Raspberry pi and mini-maestro via USB, mini-maestro and Atmega328 connected tx, rx, gnd.
Raspberrypi ttyACM0 (COMMAND PORT) – mini-maestro12
ttyACM1(TTL PORT)-- Atmega328
Of course, it would be through ttyACM0, ttyACM1, and for that I set the mini-maestro to USB dual port mode.
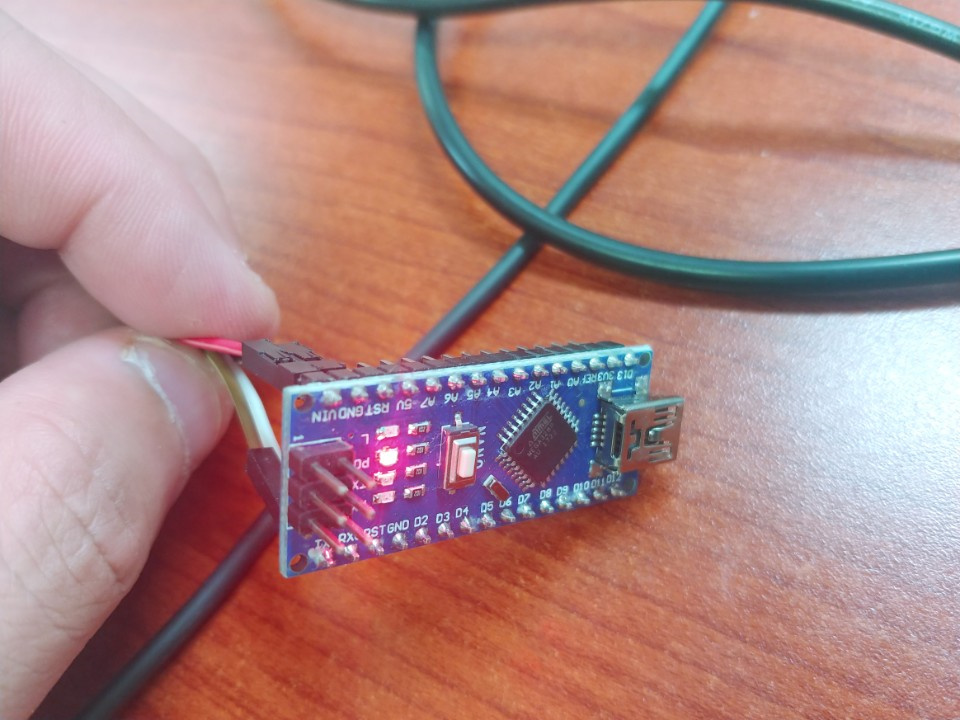
Upload the source to the Atmega328 with a “Hello” sentence at 0.5 second intervals, and connect each device to the mini-maestro with the red LED on.
There is source of Atmega328.
atmega328 source code is.
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
Serial.println("Hello");
delay(500);
}
============================================================
The reason why the error is “serial buffer full” is that the situation is the same on a Windows PC.
This is true when you connect mini-maestro to a Windows PC.
In addition, mini-maestro can be checked at the Maestro Control Center by disconnecting the USB while the external power is connected and the red led on the Raspberry pi.
If I connect mini-maestro to Raspberry pi with USB and connect mini-maestro and Atmege328 to tx rx gnd, I can control mini-maestro with ttyACM0 and Atmega328 with ttyACM1. I want to know if there is.
We are a Korean start-up called Circulus (http://pibo.circul.us) which is making small robots using mini-maestro12. It is now in mass production. I am using mini-maestro well and it seems to be able to use a lot in the future.
Please answer as soon as possible.
Have a nice day.