Hi,
I am making an autonomous rover using Orangutan X2 and VNH2 (and LCD) as the robot controller and motor controller respectively. I’ve installed a chassis around the motors to give it a rover look. The goal of the rover is to reach to the target while avoiding the obstacles in the path. I am using Polulo IR beacon pair, one on the robot and other on the target beacon.
I have two questions:
The controller I am using requires both the distance and direction to the target. I can find the direction from IR beacon pair. But is there anyway that I can find the distance between the robot and beacon using the IR beacon pair?
I need to know the speed of the robot at which it is moving. Any idea how to know the current speed of the robot will be useful.
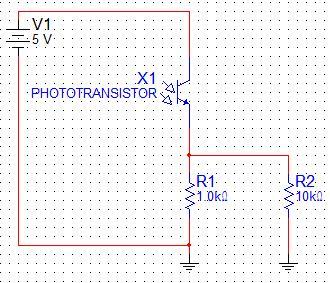
It depends on the circuit in the detector you bought. Look at the attached image.
Most IR detectors are just a voltage divider. The receiver is just a transistor in series with a resistor. (X1 and R1 in the drawing)
If the transistor is receiving little or no light the transistor acts like a very large resistor or an open circuit, making the output voltage at the top of R2 essentially ground (at or near zero volts).
If the transistor is treceiving lots of light, the transistor conducts, acting like a very small resistor, making the voltage atop R2 high (at or near 5V).
…and varying the amount of light will vary the output from zero to five volts. If you can attach a voltmeter to the output of your circuit, shine the IR on the receiver, you should be able to see this varying voltage. This is an analog output that you can convert to a distance. High voltage means the object is near, low voltage it is far away.
You can then experiment with different readings and see how the readings change as the target approaches… Then convert your readings to distance.
Unfortunately, some detectors have a “black box” or a detector unit that converts any reading to only one of two possible outputs - 5 volts or zero volts; meaning Target sensed or Target not sensed. If you only get these two readings, you can’t get distance unless you can find the place in the circuit between the transistor and R1. If you can tap off the voltage here it will work.
Look at the schematic for your sensors and see if this makes sense. Or can you post the schematic for this sensor??
The IR beacon uses modulated IR receiver modules that are quite a bit more complicated than what RoboticsProfessor described. The modules have a lot of integrated circuitry (amplifiers with automatic gain control, filters, etc.) that make them work well for their intended application, which is remote control. Unfortunately, there is no good way of getting distance information out of these modules. Therefore, if you want distance, you’ll need to use some additional sensor, such as a sonar rangefinder.
For detecting your robot’s speed, you’ll most likely want some kind of wheel encoder to count the rotation of your wheels. The encoder doesn’t necessarily have to be right on the wheel: it can be on anything that moves when the robot moves. It might be preferable to put the encoder on a wheel that is not powered so that you can detect your robot actually moving as opposed to being stuck with the drive wheels spinning.