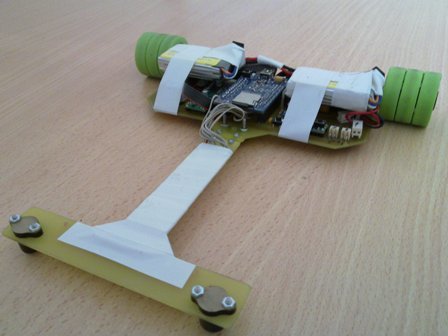
Here is the new champion of Turkey.
Speed: 1.9m/s
Turn radius: 25cm
IT IS:
Powered by Pololu
Pololu TB6612FNG Dual Motor Driver Carrier with paralleled outputs for each motor
Pololu QTR-8A Reflectance Sensor Array
Pololu Pushbutton Power Switch SV
Pololu Mini Metal Gearmotor Bracket Pair
Pololu Ball Caster with 3/8" Metal Ball
Powered by Espardino micro2148
ARM7 board based on LPC2148
http://www.espardino.com
Powered by Banebots
BaneBots Wheel, 1-3/8" x 0.4", 1/2" Hex Mount, 30A, Black/Green
http://banebots.com/pc/WHB-WS-144/T40P-143BG-HS4
Hub, Hex, Series 40, Set Screw, 3mm Bore, 3 Wide
http://banebots.com/pc/WHB-HM-HS4-M3/T40H-SM33
Powered by Maxon motor
Maxon 144325 - 12V, 2700 RPM