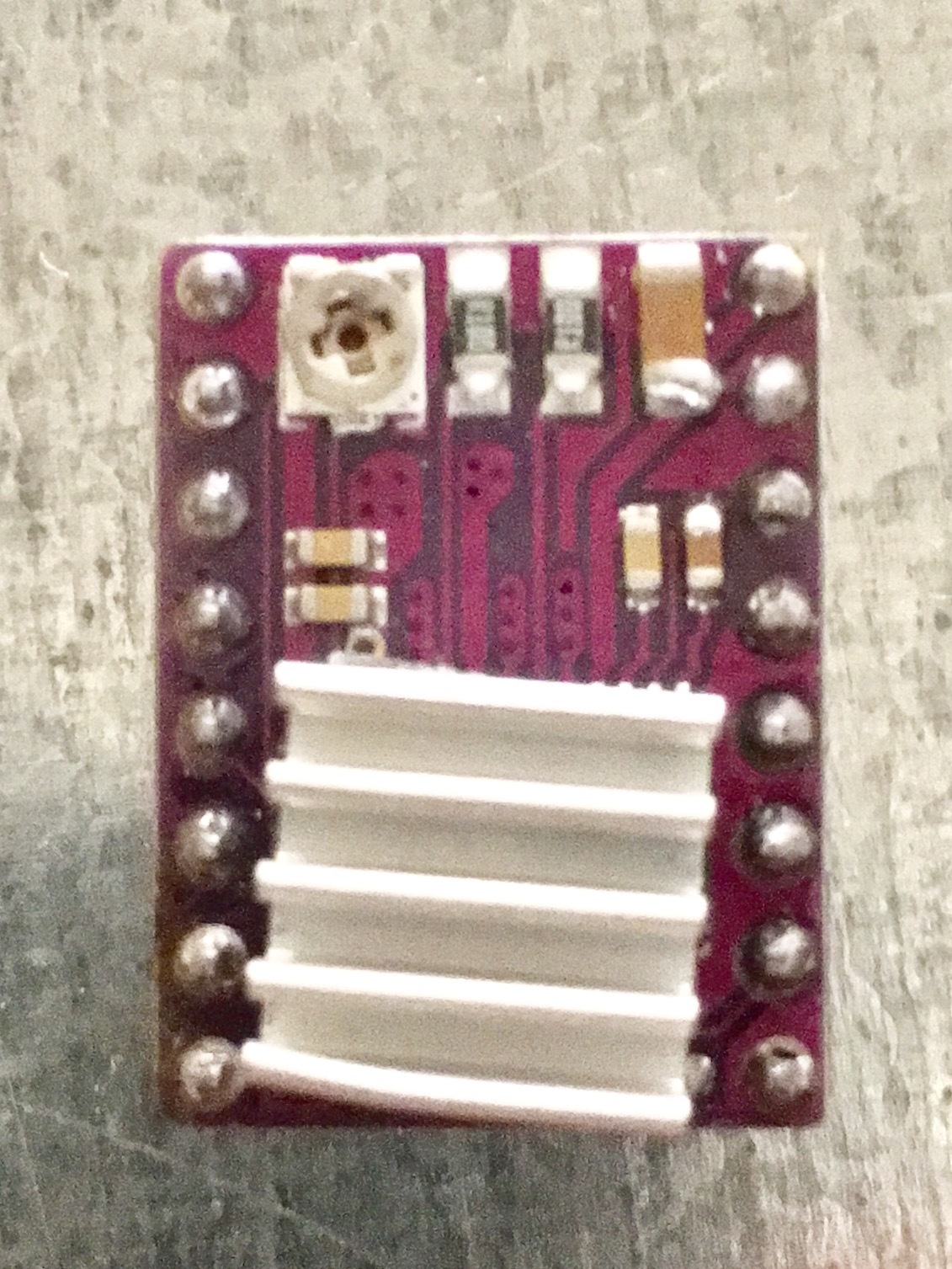
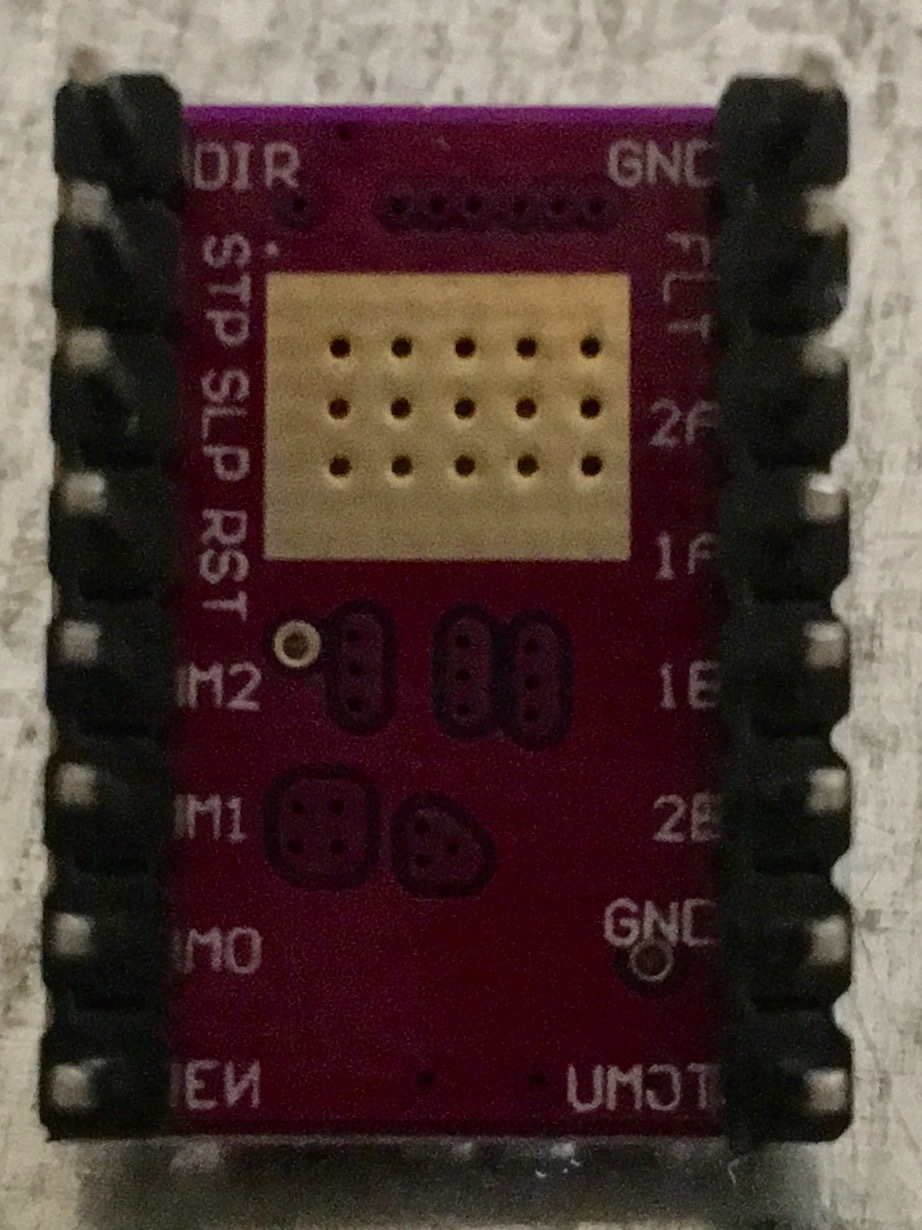
The DRV8825 IC can get hot enough to burn you long before the chip overheats, so the fact that it is hot does not necessarily indicate anything is wrong with it. It is unclear whether those are our DRV8825 boards. Could you post pictures here that clearly show the front and back sides of them? What are the motors doing when they are making that noise (are they holding a position)? It is not totally clear from the video.
Most of the noise is made by the stepper motors when they are holding position (which means their speed is set to 0 steps/sec).
How my code works is that when I connect the arduino to power and the whole thing starts running it sets the motors’ speed to 0. After I run them for the first time and then stop them again, the noise they make when holding 0 speed changes a bit (still loud) and it keeps happening as i start/stop them.
I have set up all three of the drivers on a 1/32 step setting by using the LOW HIGH HIGH configuration.
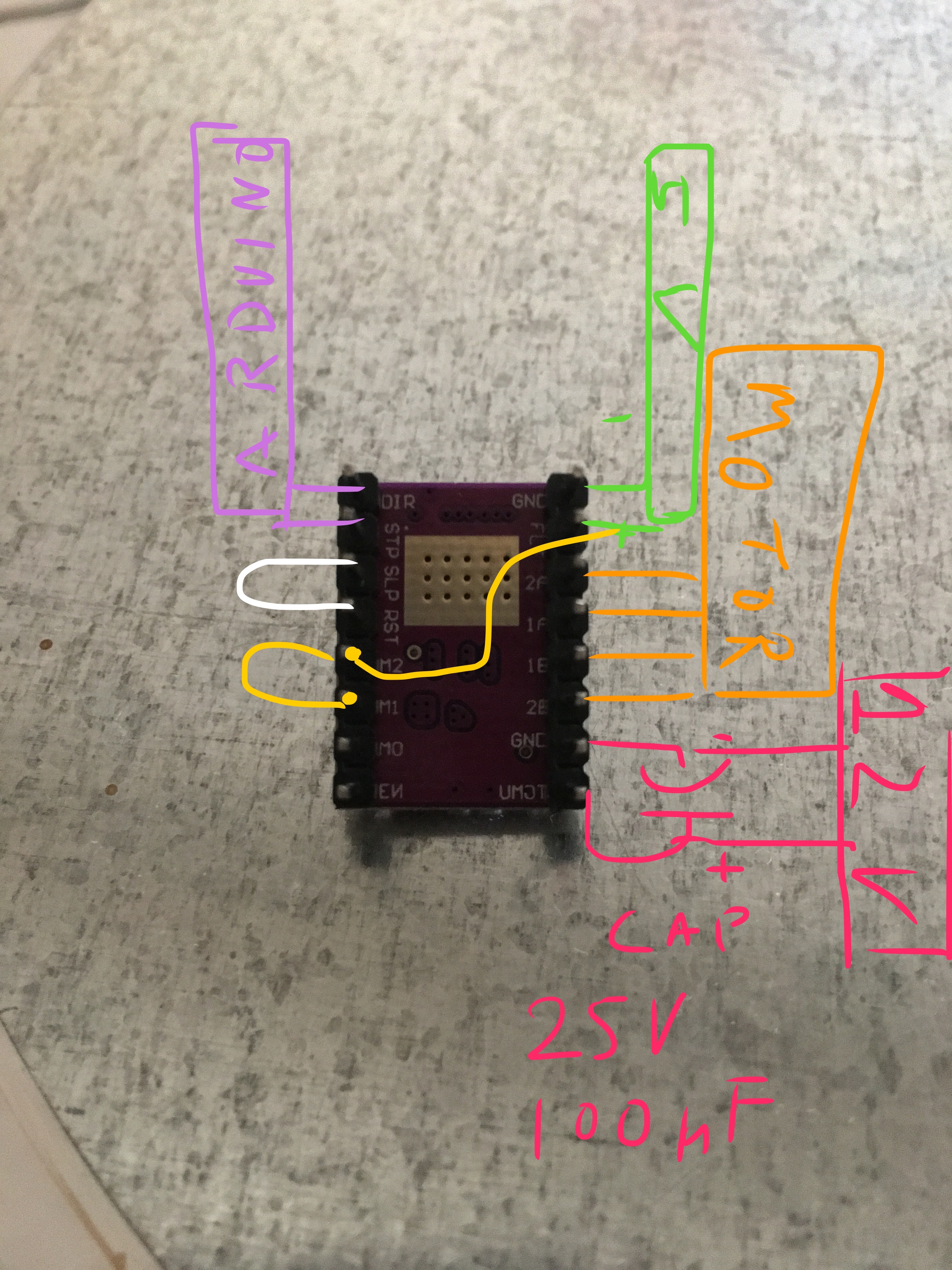
I am including a picture of my wiring, I hope you can understand it by looking at it, in any case here is a description:
GND and FLT pin connect to the ground and +5V of the arduino respectively green line
2A, 1A, 1B, 2B connect to the motor, (making sure not to use the two taps of the 6 wire step.motor which are left unconnected ) orange line
GNG and VMOT connect to a 25V 100μF capacitor ( - + respectively) and then to 12V 3500mA red line
DIR and STEP connect to the arduino digital (not analog) ports purple line
SLP and RST get short circuited (if that’s the right term) white line
M1 and M2 get 5V+ from the motor input power (Should I also connect them to GND? now they are just connected to the + side) yellow line
That is not one of our DRV8825 boards. We do not know how the manufacturer configured your board, so we cannot offer much advice for tuning your system. Our boards can deliver about 1.5A continuously without supplementary cooling, so if you are using a current well above that then the IC might be overheating (even with a heatsink). Also, the formula for the current limit using VREF on our product page is specific to the value of the current sensing resistor we use on our boards and it could be different for yours. You might try to contact the manufacturer of your drivers to see if they have any further suggestions.