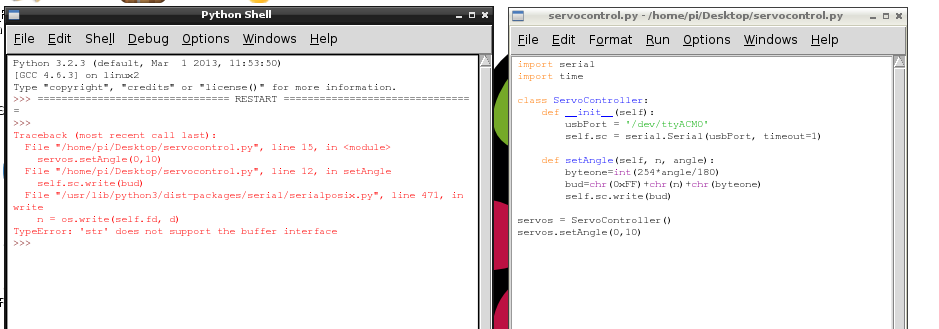
Since your code is very similar, it looks like you might have already seen this “RPi Android HTML5 Realtime Servo Control” example. If not, it might be helpful to read through. From doing an Internet search for [quote]TypeError: ‘str’ does not support the buffer interface[/quote] it sounds like it is a problem with running code written for Python 2 on Python 3. You might try either adapting the code or using Python 2.
Hi, YES!, you were right, using version 2.7 of python did solve it! I was using version 3.2
I’ll look more carefully into the changes of the string type, but at least i finally got it to work.
Thanks!!
Has anyone ported the setAngle function to Python 3 version yet? I’ve experienced so much trouble trying to convert the command char into bytes before sending it through to the serial write function.
The servo will work well with any target positions between 0-90 degrees, as well as 180 degrees, but when I tried anything between 91 and 179 it would go erracticly or just wont respond at all.