Thanks Patrick!
Yes, the result is the same when using the unmodified program. I have set the baudrate of the Raspberry Pi at 100kHz, and due to CPU scaling, the pi_delay_us is set to 20.
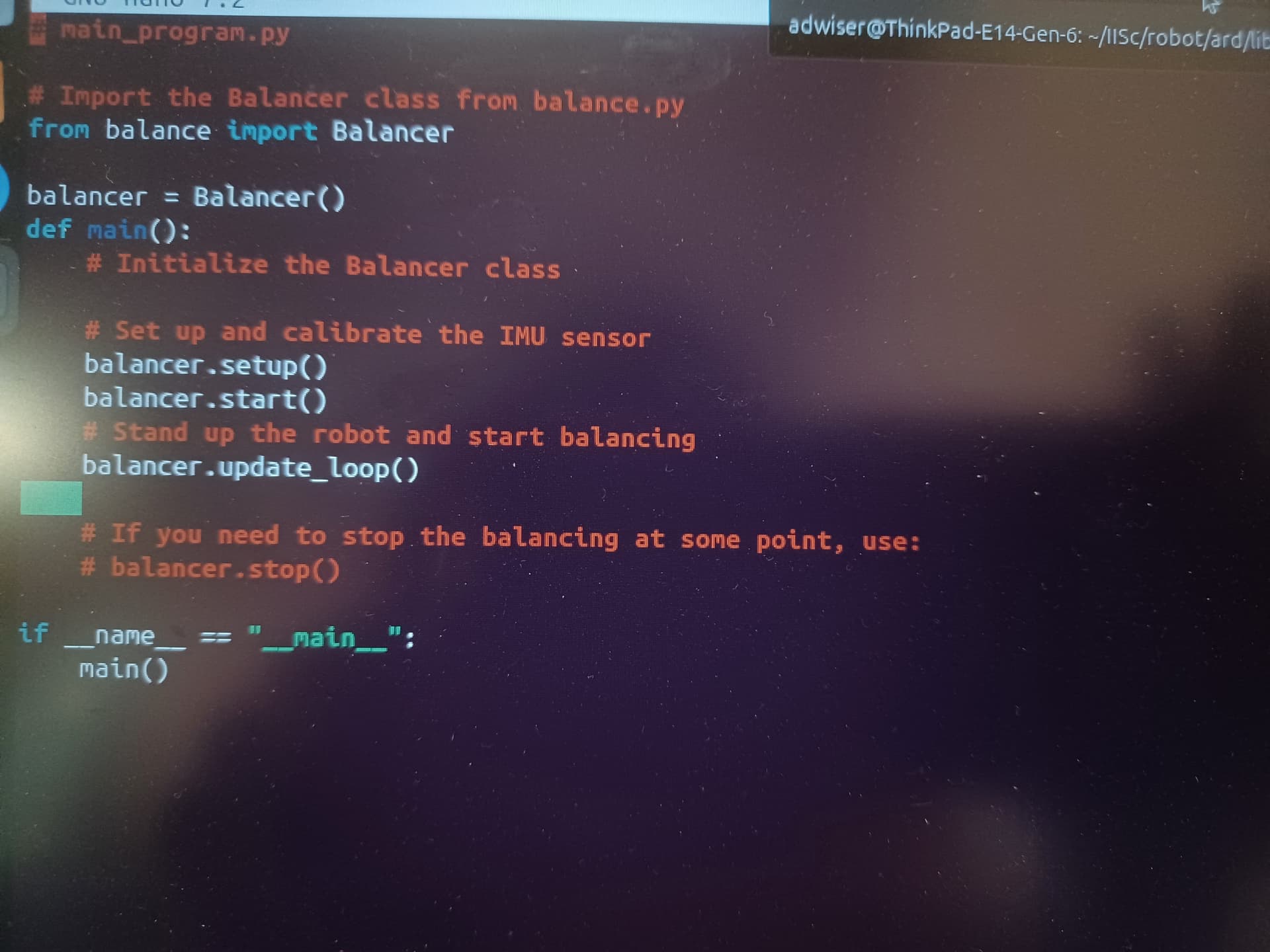
If it could be of any help, I attached a screenshot of the python script to call forth the functions described in balance.py.
Som