Hi,
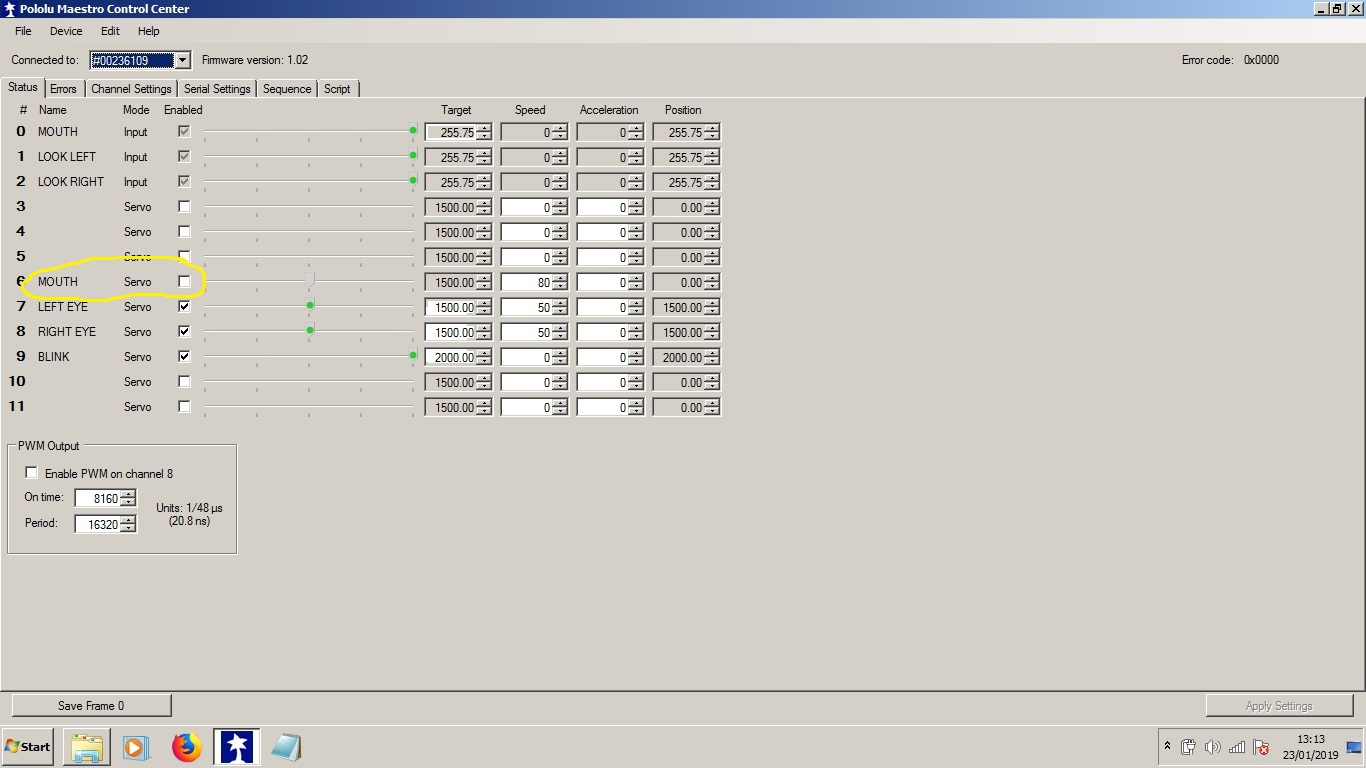
I have a script that moves servos once a button is pressed.
This all works really well.
I made a sequence for a separate servo on a separate channel but when I add this to the script it doesnt auto play.
Is this possible? I’ve seen people starting the sequence with a button but I would like this to auto play.
Thanks in advance.
begin
button_a if 1000 #button_a = mouth
else 6000
endif
sequence_a
button_b if #if button_b is pressed
8000 8000 sequence_b #move servos in one direction
else button_c if #if button_b is not pressed and button_c is
4000 4000 sequence_b #move servos in the other direction
else #if neither button is pressed
6000 6000 sequence_b #move servos to center
endif
endif
repeat
sub button_a
0 get_position 1 less_than
return
sub button_b
1 get_position 1 less_than
return
sub button_c
2 get_position 1 less_than
return
sub sequence_a
6 servo 10 delay
return
sub sequence_b
7 servo
8 servo
10 delay
return
### Sequence subroutines: ###
# BLINK
sub BLINK
300 0 0 0 0 0 0
6615 0 0 frame_3..11 # Frame 0
300 3392 frame_9 # Frame 1
2000 6525 frame_9 # Frame 2
400 3392 frame_9 # Frame 3
6000 6466 frame_9 # Frame 4
300 3392 frame_9 # Frame 5
8000 6436 frame_9 # Frame 6
300 3392 frame_9 # Frame 7
200 6496 frame_9 # Frame 8
200 3392 frame_9 # Frame 9
200 delay # Frame 11
200 6525 frame_9 # Frame 10
6000 6555 frame_9 # Frame 12
300 3392 frame_9 # Frame 13
10000 6496 frame_9 # Frame 14
300 3392 frame_9 # Frame 15
20000 6525 frame_9 # Frame 16
300 3392 frame_9 # Frame 17
4000 6436 frame_9 # Frame 18
return
sub frame_3..11
11 servo
10 servo
9 servo
8 servo
7 servo
6 servo
5 servo
4 servo
3 servo
delay
return
sub frame_9
9 servo
delay
return